
Facebookの「GEEETECH 3Dプリンタ ユーザークラブ JAPAN」からの紹介で
まあ、モニターのキャンペーンみたいなもので
こんな機会は滅多にないので設置場所がないとか言っている場合じゃありません。
こんな機会は滅多にないので設置場所がないとか言っている場合じゃありません。
未組み立て 3Dプリンタ DIYキット」を
その組立の長~い記録です。まだ完成していませんが、1投稿で過去最長かな?
 |
| 買った時のスクリーンショット 出所:Amazon |
てっきり中国からだと思ってたので、心の準備ができていませんでした。
通関税など一切かからないのでAliExpressからより安くつくのかも?
でかい箱で9.7Kgありました。

中国から2018年5月26日に発送されています。

Amazonの大阪倉庫?のようです。

両方共パーツリストでしたが、
A4、1枚の方は、梱包者のチェックが入っています。

途中からAmazonサイトのGeeetechの問い合わせ先の方に最新のをもらいました。
が、実は、投稿のまとめに入って改めてAmazonを見ると、これが!
*****
お使いのプリンタのビルド手順とユーザーマニュアルをダウンロードできるリンクは次のとおりです
~https://drive.google.com/file/d/1k5qjNMJkzMz2Jl0Q1WKanp_O8c4MzR2_/view
https://drive.google.com/file/d/1JJLMuyJyLi_FQUY6O6pmy92pUg5hcKcc/view
*****
あぁ~、Facebook経由でわざわざ入手したものと同じだったのです(-_-;)
たぶん、Amazonサイトのこのリンクは常に最新にされるのだと思います。
最初にダウンロードすることをお薦めします。
最初は、自力で検索してGreeetechサイトのこの古いPDF
「Acrylic I3 pro B 3D Printer building instruction.pdf」でやっておりました。
その組立マニュアルの外観はこれで
その組立マニュアルの外観はこれで

購入したAmazonのは、これで、少し異なるのですが
何とかなるだろうと進めておりましたが、
あまりにもパーツNo.が違うのでついにGeeetechに問い合わせて
最新版を入手したりとかなり回り道をしてしまいました。
あまりにもパーツNo.が違うのでついにGeeetechに問い合わせて
最新版を入手したりとかなり回り道をしてしまいました。

いつもの様に、この辺の右往左往している様をありのままに記録すると
これ見て組み立てる方がおられると大混乱になりますので
今回は、編集して、失敗は、後ろにまわすようにします。
早く組み立てたい気持ちで頭が一杯なので
最初に全部のパーツをチェックするのは、無理でした。
大物は、組み立ながらでいいかなっと!
これ見て組み立てる方がおられると大混乱になりますので
今回は、編集して、失敗は、後ろにまわすようにします。
早く組み立てたい気持ちで頭が一杯なので
最初に全部のパーツをチェックするのは、無理でした。
大物は、組み立ながらでいいかなっと!
組立マニュアルは、英語ですが、印刷しておくことをお薦めします。
マーティーは、記録しながらなのでPDFでやっていたら見落とし続出でした。
Amazonのリンクのは、Version 04-11-2016でした。
<No.>は、マニュアルの番号と英文表記です。
<1.Unfold the Box and Check the Package>
まず、箱の中は、マニュアルの3段ではなく、2段になっています。
1段目。マウスパッドがオマケについています。



特に曲がりがないかは、念入りに!数本を束ねると曲がりはすぐにわかります。

特のこの中袋内の小袋の番号が重要ですので最初に確認しておくのが良さそうです。

No.6~No.20までのナット、ワッシャー類
後で分りますがM3ワッシャーは多分にあり心置きなく使えます!
後で分りますがM3ワッシャーは多分にあり心置きなく使えます!

No.21~No.35までのビス・ボルト、バネ類
こちらは、ほとんどが多めに入っていました。
M3x10mmとM3x12mmなど長さが微妙なので使う時には注意が必要です。

No.36~No.40までのリニアブッシュとベルト
ベルトは、X軸用、Y軸用と予めカットされて別の袋に入っています。

No.41~No.52までのカプリングやプーリーなど色々

No.53、54、56
ファンとハーネス。No.55は、USBケーブルで別の袋です。

「A」付きのNo.は、アクリルですね。
 右下の2種類にはNo.がないですが
右下の2種類にはNo.がないですが

小さい丸:A19、横長の:A21 です。

事前に以上のものを確認しておけばスムーズに組み立てできます。
サイズとかではなく、ボルト等も袋の番号で探せるので、それは、やり易いです。
全部、部屋とか廊下とかに並べられると見つけるのが楽なのですが...
パーツ探しとアクリルパーツの保護シート剥ぎは、結構な時間を食います。
サイズとかではなく、ボルト等も袋の番号で探せるので、それは、やり易いです。
全部、部屋とか廊下とかに並べられると見つけるのが楽なのですが...
パーツ探しとアクリルパーツの保護シート剥ぎは、結構な時間を食います。
後、+-ドライバー、タイラップなどの袋があります。
残念ながら六角レンチは、大き過ぎ、小さ過ぎで使えませんでした。
工具は、これだけでは組立できません。
M10ナット用スパナとか、都度、準備します。
ヤスリ?最初、何に使うんだろうと思いました、後の方で使うのでお楽しみに^^;
 残りのパーツは、組みながらチェックしていきます。
残りのパーツは、組みながらチェックしていきます。
工具は、これだけでは組立できません。
M10ナット用スパナとか、都度、準備します。
ヤスリ?最初、何に使うんだろうと思いました、後の方で使うのでお楽しみに^^;

では、ようやく、組立開始です!
<2.Assemble the Rods of a Y-axis>
Step1. Assemble the 2 Threaded Rods.
Y軸ロッドの組立です。<2.Assemble the Rods of a Y-axis>
Step1. Assemble the 2 Threaded Rods.
パーツリストは、組立マニュアルのコピペです。
 No.5:M10 x 450mm Y-axis(普通のM10のボルト棒のです。)
No.5:M10 x 450mm Y-axis(普通のM10のボルト棒のです。)

これが、一番長いパーツかな?
45cmの定規はあった方がいいです。

(古いマニュアルを使うとNo.がかなり違うので探すのに苦労しました)
この様に組みます。
 組立中。
組立中。
 完了。
完了。
中央部のナットは、まだ締めません。
 Step2. Assemble the 2 Smooth Rods.
Step2. Assemble the 2 Smooth Rods.
 No.3:Φ8 410mmのスムーズロッド(一番長いロッド)
No.3:Φ8 410mmのスムーズロッド(一番長いロッド)
ロッドの表面にオイルが少し付いていますが、汚れや曲がりがないか確認します。


中央部のナットは、まだ締めません。


ロッドの表面にオイルが少し付いていますが、汚れや曲がりがないか確認します。


スムーズではないのです。
動画です。最初のは、正常品。2番目のが異常品。
即断で代品をおくる手はずをしてくれました。応答はとても早いです。
取り敢えず、赤テープで目印を付けて組立続行です。


No.13、Screw Locking Ringにイモネジを付けますが
付属の六角レンチは、ひと回り小さいのでした(写真上側)
 この組立は、できるだけ平らな所でやる必要があります。
この組立は、できるだけ平らな所でやる必要があります。

組立説明書では、この写真しかありません。

これは、マニュアルの後ろの方の写真とか見て結構悩みました。
まず、全体を並べます。
ロッドが曲がっているのは、レンズの歪です。
まず、全体を並べます。
ロッドが曲がっているのは、レンズの歪です。



先にStep1で組立準備していたM10 450mmを入れて
2本の飛び出しをある程度同じにして
No.9のM10用ワッシャーとNo.13のM10ナットで本締めします。
取説の後ろの方を見るとこれ位、飛び出していればいいようです。



No.9のM10用ワッシャーとNo.13のM10ナットで軽く止めます。
 真上から(作業しながらなので撮影アングルがコロコロ変わります)
真上から(作業しながらなので撮影アングルがコロコロ変わります)



そこで、X軸用の390mmのスムーズロッドを利用します(たまたま丁度よかった)
その390mmのスムーズロッドを挟み込んで外側のM10ナットを
指でいいので強く締めます。(内側のナットは、余裕を持って緩めておきます)
390mmのスムーズロッドが固く挟まれる位に内側のナットをスパナで締めます。
390mmのスムーズロッドの両端を手で引き上げて外します。
引き上げる時、緩るければ、締め直します。
 もう一方も同じ390mmのスムーズロッドで同様にして幅を合わせ
もう一方も同じ390mmのスムーズロッドで同様にして幅を合わせ
引き上げる時、緩るければ、締め直します。

外側ナット ⇒ 内側ナットの順に締めます。
390mmのスムーズロッドの両端を引き上げ外します。
外側のナットは、スパナでは、締め過ぎると
390mmのロッドが曲がる可能性があるので注意です。
これでかなり正確な長方形になったと思われます。
(写真撮り忘れ)
Y軸用のスムースロッドにつけていた
ロッキングリングのイモネジを締めて動かないように固定します。
ここは、スムースロッドにガタがあるとY軸の位置精度に影響するので
6mmボルト(短いのがいい)とロッキングリングを
ウォーターポンプレンチ(のようなもの)で押さえ付けてイモネジを締めます。
ウォーターポンプレンチ(のようなもの)で押さえ付けてイモネジを締めます。
ウォーターポンプレンチは少し手加減しないとアクリルが反るので適度な強さで。

指力に自信があれば、指でやってもいいと思います。
スムースロッドが回転するようでしたら、やり直します。

M10の六角ナットをあまり締めすぎても良くない場合があります。


マーティーのは全部黒でした。

U字金具にM3x20mmボルトをネジ込みます。

ただ、こちらは、10mm長い30mmボルトを使います。
 ボルトは、これ。
ボルトは、これ。
 後は、2個、同じパーツです。
後は、2個、同じパーツです。
 Step2. (英文長いので省略)
Step2. (英文長いので省略)



プーリーにベアリングを両側から挿入します。
 Step3.
Step3.
この様にプーリーを挟みますが、回らないと意味がないので、
ちょっと緩い位になるように股を広げてから入れます。

この様にプーリーを挟みますが、回らないと意味がないので、
ちょっと緩い位になるように股を広げてから入れます。

プーリーにボルトを通してロックナットで締めますが、
回らなくなるギリギリで寸止めして、よく回ることを確認します。
回らなくなるギリギリで寸止めして、よく回ることを確認します。
ホントは、間にベアリングの内側の回転部分と同等径の小さなワッシャーを
噛ませるといいのですが、手持ちがなく。

ボルトが長い方も、もう1セット組み立ておきます。
後の方で使うので羽つきナットをつけて保管しておきます。
(写真撮り忘れで、上の写真を加工しております)
 Step4
Step4

ボルトが短い方のプーリーを先に組み立たY軸フレームの四角穴に入れ、
羽つきナットで軽く留めておきます。
羽つきナットで軽く留めておきます。



GEEETECHブランドになっています。

ステッピングモーターにプーリーを付けます。
一つのイモネジは、モーター軸の切り欠きに合わせて、
軸の根本ギリギリまで入れていいようです。
 Step2
Step2
プレートを3本のM3ボルトでステッピングモーターに取り付けます。
軸の根本ギリギリまで入れていいようです。

プレートを3本のM3ボルトでステッピングモーターに取り付けます。
M3ワッシャーが沢山あるのでアクリルにM3ボルトを使う時は、入れた方がいいです。
(これは、入れる前の写真ですが)
 プレートの裏表に注意します。これは、逆です。
プレートの裏表に注意します。これは、逆です。
 赤枠部にM3角ナットを入れてから
赤枠部にM3角ナットを入れてから

 実は、最初、古い組立マニュアルを使っていたので
実は、最初、古い組立マニュアルを使っていたので
プレートが裏表逆になっていたのです。
逆につけると、ステッピングモーターとプーリーが斜めになります。
(これは、入れる前の写真ですが)



Y軸フレームに差し込みM3x20mmボルト+M3ワッシャーで留めます。
ステッピングモーターがフレームにピッタリついていることを確認します。
ステッピングモーターがフレームにピッタリついていることを確認します。

プレートが裏表逆になっていたのです。

赤矢印の所が斜めになっているからだと思われます。
赤丸部を見るとよくわかります。
ここは、自力で悩んで裏表を変えたので随分と時間のロスになりました。
最初から最新のマニュアルを使わなかったマーティーが悪いのですが(-_-;)
良い勉強にはなりました。
赤丸部を見るとよくわかります。
ここは、自力で悩んで裏表を変えたので随分と時間のロスになりました。
最初から最新のマニュアルを使わなかったマーティーが悪いのですが(-_-;)
良い勉強にはなりました。


ヒートベッドの下に硝子板と一緒に隠れていました!
写真にないですが、No.7 M3ワッシャーは、沢山あるので使います。

赤枠部のパーツをつけます。
アクリルの茶色の保護シートを剥ぐのがわりと大変で時間食います。
急ぐと破れて返って時間かかりるし...
Y Bearing Block:No.A16は、穴が4つありますが、外側の穴で留めます。
M3 x 20mm Screwの不良が2個ありました。
裏側のナットを掴んでないと締められないので5.5の六角Socketでやります。
後でY軸プラットフォームに取り付けて位置決めするので、
前後左右に動く位に軽く留めておきます(まだ手でよかったな~)
真中のBelt Mountを留めようとしたら、M3 x 10mmでは、長さ不足です。
No.27のM3 x 16mmで留めることにします。こちらは本締めしていいです。
どうも改善されてアクリル板を厚くしているからのようです。

実は、この段階で、M3用のワッシャーが沢山あるのに気づいたのです(-_-;)
これ以前でM3ボルトを使った所にワッシャーを入れる作業で逆戻りです。
またもや時間をロスるマーティーであります。
マニュアルでは、使っている時といない時がありますが、単なる漏れでしょう。

またもや時間をロスるマーティーであります。
マニュアルでは、使っている時といない時がありますが、単なる漏れでしょう。

さ~てと、ワッシャーをつけ終わったので
先に進みます。まだ13個だったので助かった~
Step3
ベアリングブロックの凹みにリニアブッシュが入るようになっています。
ベアリングブロックの凹みにリニアブッシュが入るようになっています。

先に組み立た、Y軸のプラットフォームを裏返して、
ベアリングブロックの凹みにリニアブッシュを入れ込んで
タイラップ(結束バンド)で強く留めます。

アクリルのNo.A16パーツのM3ネジを本締めしていきます。
ここで、六角Socket(5.5)の出番です^^;
ここで、六角Socket(5.5)の出番です^^;


一個ベアリング不良のままなので、ゴロゴロと音は大きいですが、
一応、ズレはないようでスムーズそうです。

Facebookで連絡したらすぐに来ました!
Version 04-11-2016版でした。
前の方を見るとパーツNo.も一致しています。
早く貰えばよかった、というか、Amazonのリンクに全く気づいていなかったのです。
早く貰えばよかった、というか、Amazonのリンクに全く気づいていなかったのです。
YouTubeの組立映像のリンクもついています。
新しいマニュアルには、透明モデルの写真もあるので見やすいです。
 ブログでは、最初から新しい組立マニュアルでやっているように書いていますが
ブログでは、最初から新しい組立マニュアルでやっているように書いていますが
新しいマニュアルには、透明モデルの写真もあるので見やすいです。

ホントは、マーティーは、やっとここから新しいマニュアルでやっております^^;
<7.Mount the Y–axis Belt>
ここは、M3ワッシャーが載っています。
ここは、M3ワッシャーが載っています。

パーツ集めます。
 Step1
Step1
まず、ベルトの片方に3mmの穴を開けるということなので

まず、ベルトの片方に3mmの穴を開けるということなので
この穴あけパンチを使います。


ステージ中央のアルミのBelt MountにM3ボルトとワッシャーをつけて

この様に留め、ベルトが潰れない程度に締めます。

プーリーの羽つきナットを少し緩めて調整してもいいようです。
長さが決まったら決断してベルトをカットします。

反対側の穴を開けたらBelt MountにM3ボルトとワッシャーで固定します。
この時は、プーリーは、外しておくとやり易いです。
 プーリーを取り付けて羽つきナットを回してベルトに適度なテンションを掛けます。
プーリーを取り付けて羽つきナットを回してベルトに適度なテンションを掛けます。

いい感じになってきました。



マニュアルの写真には、No.6のM2.5ワッシャーが付いているので出します。
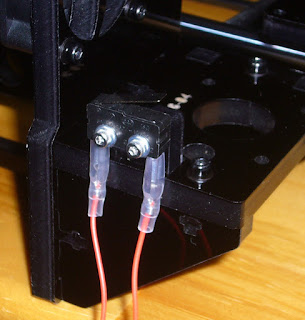
リミットSWは、赤・青・黒ありますが、どの色でもOKです。
 先にボルト、ワッシャー、ナットを付けます。
先にボルト、ワッシャー、ナットを付けます。


この様に取り付けます。
スイッチは弱いので、割れないように適度に締め付けます。



ここもNo.7のM3 ワッシャーを使います。
机に乗らないな~
それにしても大きので保護シール剥ぐのにやたらと時間がかかります。
心を落ち着けてやれば、それなりに楽しくはやれます。

このボルト取り付け構造は、勉強になります。


後でY軸プラットフォームと合体して本締めするので
仮締めにしておきます。
実は、ここで左右の羽を逆にしていて、気づくのは、かなり後なのです(´-﹏-`;)
 マニュアルのこの写真が正解なのです。
マニュアルのこの写真が正解なのです。
これ間違えると後で大変です。
長孔が付いている方が正面から見て右側です!
仮締めにしておきます。
実は、ここで左右の羽を逆にしていて、気づくのは、かなり後なのです(´-﹏-`;)

これ間違えると後で大変です。
長孔が付いている方が正面から見て右側です!

<10.Mount the Fan>

ここもNo.7のM3 ワッシャーを使います。
 小さなファンなのにやけに頑丈な取り付けになっています。
小さなファンなのにやけに頑丈な取り付けになっています。

ロックナットじゃなくていいと思うのだが、
と思ったらマニュアルに
「If you don ’t want to use the lock nut you can hex nut. 」とありました!
 <11.Assemble the Z-axis Bottom Mount>
<11.Assemble the Z-axis Bottom Mount>


ここもNo.7のM3 ワッシャーを使います。
 まずこんな感じで仮組みして~
まずこんな感じで仮組みして~

特に左側の!裏表があり、小さい方の穴が右側になるようにします。
2本のボルトにワッシャー入れて留めます。
この写真は、右側のが裏表逆なのです(-_-;)
ここも随分先の方で気づいて、後で修正したので大変でした。
 メインフレームに左右を間違えないように取り付けてから、
メインフレームに左右を間違えないように取り付けてから、
残りのボルトで取り付けます。
一つのボルトを一気に締めるのではなく、
全体を少しずつ締めていくのがよいと思います。
左側は、突起があるこれ!
 右側。この写真は間違っている時のですが...
右側。この写真は間違っている時のですが...
裏表逆なので小さい方の穴が内側に!
小さな穴が外側(矢印の方)にあるのが正しいです。
 マニュアルの正しい写真は、これ!
マニュアルの正しい写真は、これ!
黒なので見落としがちではあります。と言い訳(-_-;)
 全体の様子です。
全体の様子です。
(この写真も左右の羽と下右のパーツが間違っていますが)
 <12.Assemble Y-Z axis>
<12.Assemble Y-Z axis>
大物の合体です。
 ここもNo.7のM3 ワッシャーを使います。
ここもNo.7のM3 ワッシャーを使います。
 Y軸プラットフォームとXZフレームを合体します。
Y軸プラットフォームとXZフレームを合体します。
Y軸の中央固定具を15cm位の所に
もう一つのナットは、18cm位の位置にしておきます。
 で、この様な位置に置いて
で、この様な位置に置いて
 Y軸プラットフォームをXZフレームの中を通して上からそっと置きます。
Y軸プラットフォームをXZフレームの中を通して上からそっと置きます。
XZフレームの下のバーの両側のナットの位置に注意します。
 赤丸部を差し込んで
赤丸部を差し込んで
 先に後ろ側に角ナットを入れてボルト2本を留めます。
先に後ろ側に角ナットを入れてボルト2本を留めます。
 次に中央部にアクリルフランジにM3ボルト+ワッシャーを入れます。
次に中央部にアクリルフランジにM3ボルト+ワッシャーを入れます。
ボルトだけ上から入れて
 拡大!
拡大!
 横にしてナット+ワッシャーをつけます。まだ締めません。
横にしてナット+ワッシャーをつけます。まだ締めません。
 拡大!
拡大!
 元に戻して平らな所に置いて
元に戻して平らな所に置いて
ガタがある時は、浮いている所の外側のM10ナットを
わずかに(15~30°位)締めるか、反対サイドをわずかに緩めて調整します。
 横にして4つのM10ナットを全体的に少しずつ締めていきます。
横にして4つのM10ナットを全体的に少しずつ締めていきます。
 もとに戻して、ガタツキがないか確認しながら
もとに戻して、ガタツキがないか確認しながら
こんな感じでレンチ(スパナ)で少~しずつしか締めることができません。
そんなに強くは締めなくていいハズです。
 XZフレームのM3ボルト6箇所を本締めします。
XZフレームのM3ボルト6箇所を本締めします。
前後左右に揺らしても机の方が一緒に揺れるくらいなので
CNCのように負荷は重くないだろう3Dプリンタとしては、大丈夫な感じがします。
 <13.Mount Z-axis End Stop>
<13.Mount Z-axis End Stop>
 No.6のM2.5 ワッシャーも使います。
No.6のM2.5 ワッシャーも使います。
 メインフレーム左側のステッピングモーターフォルダに取り付けます。
メインフレーム左側のステッピングモーターフォルダに取り付けます。
裏表あります!この様にレバー部が右上がりの向きにします(2018.7.30追記)
 <14.Assemble the 2 Z motors
<14.Assemble the 2 Z motors
2本のボルトにワッシャー入れて留めます。
この写真は、右側のが裏表逆なのです(-_-;)
ここも随分先の方で気づいて、後で修正したので大変でした。

残りのボルトで取り付けます。
一つのボルトを一気に締めるのではなく、
全体を少しずつ締めていくのがよいと思います。
左側は、突起があるこれ!

裏表逆なので小さい方の穴が内側に!
小さな穴が外側(矢印の方)にあるのが正しいです。

黒なので見落としがちではあります。と言い訳(-_-;)

(この写真も左右の羽と下右のパーツが間違っていますが)

大物の合体です。


Y軸の中央固定具を15cm位の所に
もう一つのナットは、18cm位の位置にしておきます。


XZフレームの下のバーの両側のナットの位置に注意します。



ボルトだけ上から入れて




ガタがある時は、浮いている所の外側のM10ナットを
わずかに(15~30°位)締めるか、反対サイドをわずかに緩めて調整します。


こんな感じでレンチ(スパナ)で少~しずつしか締めることができません。
そんなに強くは締めなくていいハズです。

前後左右に揺らしても机の方が一緒に揺れるくらいなので
CNCのように負荷は重くないだろう3Dプリンタとしては、大丈夫な感じがします。



裏表あります!この様にレバー部が右上がりの向きにします(2018.7.30追記)




M3ボルト+ワッシャーで固定します。




隙間にアルミ切り屑が入ってないか確認しておきます。
カッターの刃などを隙間に入れるのもいいかもです。




こっちの方が強く締めれる気がしますが...


組立の大半を占めている気がします。
パーツを全部廊下に並べておきたいものです。さっきも書いた気もするなあ~
(組み立てながら、写真撮りながら、記録もしているもので)

引出線が稼働時の屈曲で切れそうな不安がよぎります。
後で配線する時に考える必要がありますね~

4コーナーの穴にM3ボルト+ワッシャーを入れ、
ヒートベッドの下にバネを入れ、ステージの穴に入れて
下から羽つきナット+ワッシャーで軽く留めます。


ヒートベッドの熱で溶けたりしてやっかいなので
キレイに拭き取ってから、ヒートベッドの上に乗せます。
ガラス板をヒートベッドに事務用?クリップで留めます。
このクリップ、一部の方の流行りかと思っていたら、標準仕様なんですね^^;



穴位置が微妙に合っていません。
奥側は、長めの六角レンチがないと、とても留め難いです。

フランジ付リニアブッシュをM3x6mmボルトで軽く留めます。
左の様に斜めにならないように右の様にして
6本のボルトを少しずつ全体を締め込んでいきます。
どうもクリアランスが無さすぎる気がします。

気になって仕方なくなり、また分解して修正しました。
バージョンによっては、大丈夫のものもあるようです。
一応、この場所に修正の詳細記録を残すことにします。
で、分解してT8ナットを見ると少し凹んでいます(マジックの黒い線の間)
横のリニアブッシュとゼロ嵌合どころかマイナス嵌合だったのです。
T8ナットを逆さにつけようかとも思いましたが、羽が当てって全く入りませんね~


動画で!
4つの穴位置が微妙に精度が悪く。4つを少しずつネジ込んでいかないと
ボルトが斜めになったります。ネジ穴も少し削ればよかったなあ~
半分くらい出るようにねじ込みます。



イモネジの一つは、ステッピングモーターの軸の切り欠きに合わせ固定します。
バージョンによって軸の長さが違うようで、
取説の写真も長いのや短いのが混ざっています。
まあ、ズレていれば後で調整することにします。




向きが逆でした(-_-;)(2018.7.30追記)





同じなので途中は省略です。
思うに、これと先の金具ブロックだけ2ピース構成を事前に組み立られています。
精度を要求される所だけどシートメタルで作られているので、不安がよぎります。
特にリニアブッシュとT8ナットの位置精度、大丈夫かな~
ブロックを組み立てから穴を開けていれば、いいのですが、
そんなことはないでしょうから...

マーティーのよりリニアブッシュは長く、T8ナットは短いです。


黒でした!青だと思い込んで探しておりました。
リニアブッシュは事前にロッドに入れてみてスムーズに動くか確認しておきます。
ここもM3ボルトには、No.7のM3ワッシャーを使います。


X Carridgeの裏表に注意します。

四角穴とリニアブッシュにガタツキはないのでM3ボルトをしっかり締め込みます。
こうゆうものは、対角線上のボルトを徐々に締めた方がいいでしょう。
X Carridgeは、レーザーカットではなさそうで
金型でパンチングして作成されているようなので、精度は確保できてると思います。

向きを間違えないように、マニュアルに合わせます。
ベルトブラケットのナット用の穴にM3ナットを入れておいて
M3x12mmにM3ワッシャー入れて取り付けます。
リニアブッシュに一番近い長穴です。
横に動きますが、後で調整しなくてよかったので、本締めしていいです。

ガタがなくピタッと入るのは気持ちもよく安心できます。
このブロックは、精度良さそうです。
と、この時は、思っていたマーティーでしたが
後で修正することになるとは...一応、このまま作っておいていいです。
たぶん、バラツキでハズレを引いたのでしょう?



X軸のMotor EndとIdler EndにNo.4 台形ネジを中間位までねじ込みます。
この位、端っこの方がいいようです。左が下側になります。

390mm(長い方)のスムースロッドを通しておきます。

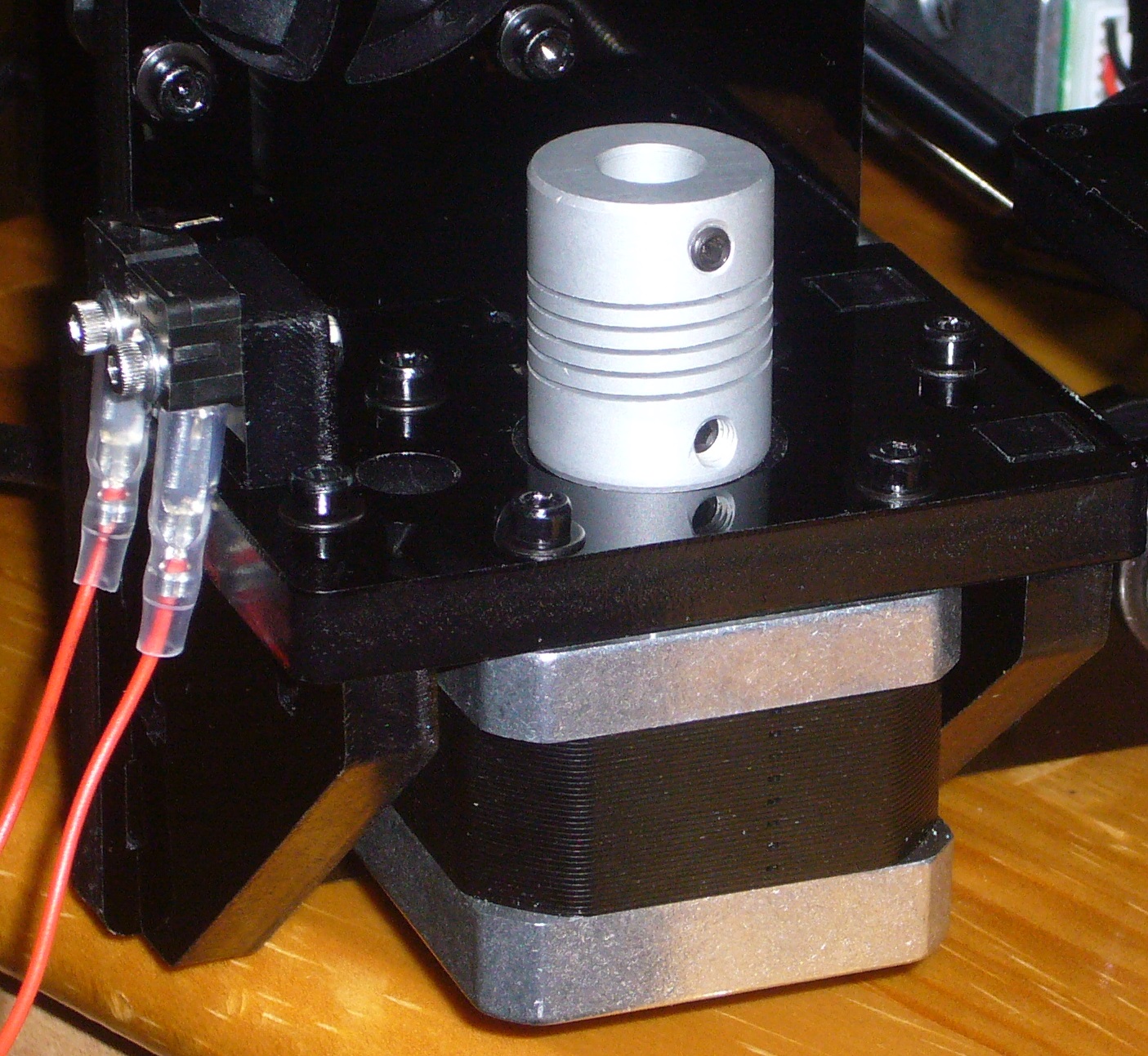
右側のZ軸のステッピングモーターのカプラーに
X-axis Mortor Endの台形ネジロッドを奥までネジ込みます。
横のスライドブッシュに322mm(短い方)のスムースロッドをゆっくり差し込みます。
カプラーのイモネジは、まだ締めません。


今頃気づいてガックリです。。。。。修正しました^^;

キチキチよりやや小さくどうやっても入りません(´-﹏-`;)
工程のバラツキで太いのでしょう。
Y軸用の短いスムースロッドは、入るのです。
ロッドを冷蔵庫で冷やすか、エンドブロック側を真夏の太陽で温めることも
考えましたが、そんな事して無理に入れても後で調整が効かないし~
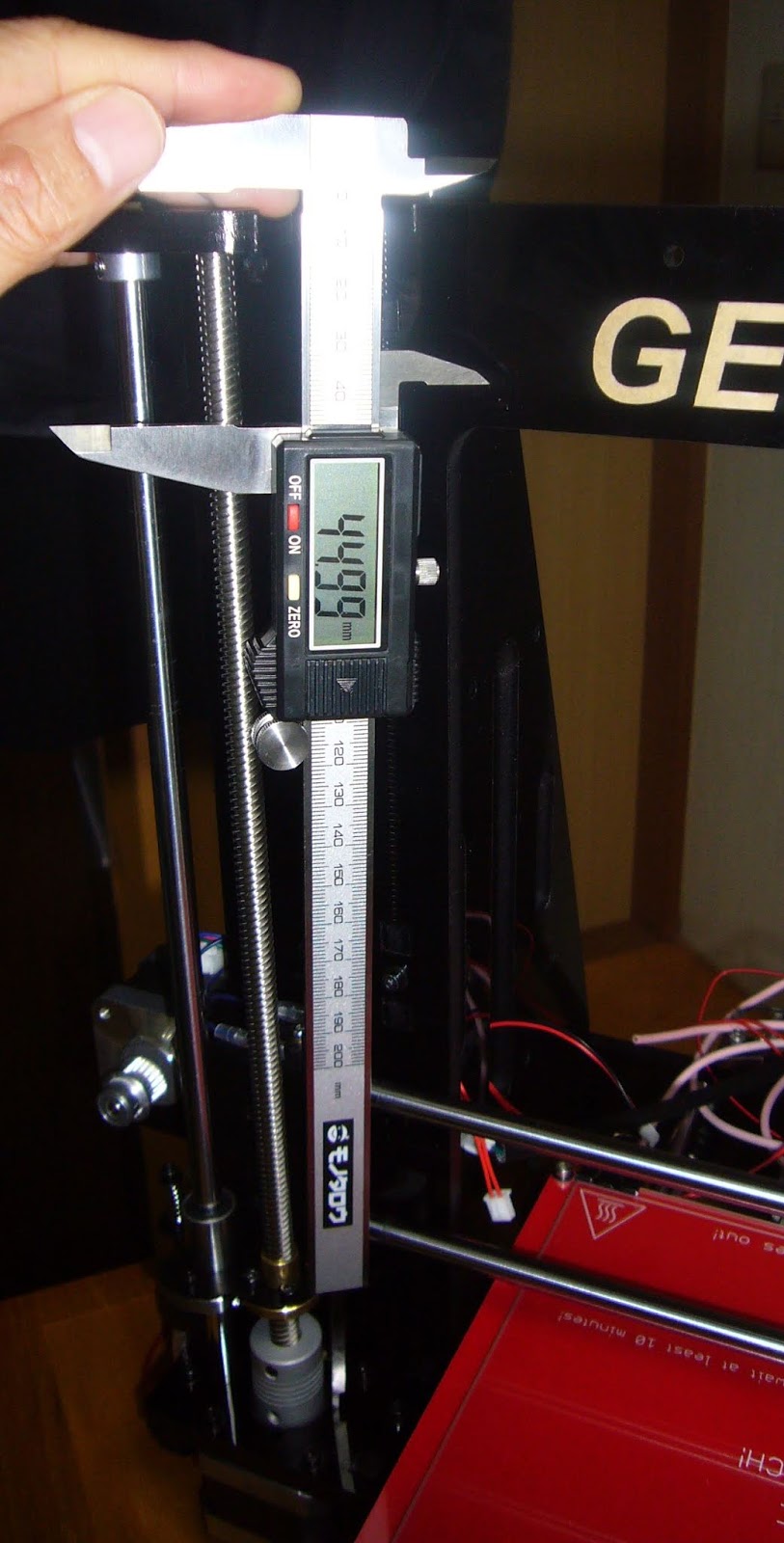
モノタロウさんのデジタルノギスで径を測定すると(28°のエアコン室内で)
X軸用のは、2本の両端、4箇所全て8.00mm
これは、困った~

0.02mmの差で運命が別れたようです。

Z軸のスムースロッドは、入るので、それを浅く入れて根本を持って
円を描きながらコネ回して穴を無理やり広げるのです。
ゆっくりそっとです。根本を持たないとロッドが曲がっては大変です。
15分程、慎重に格闘してやっと入るようになりました。
荒業の様子を動画で!
右側のX軸エンドブロックにロッドを通し、長さを互い違いにします。
エクストローダー・ホルダのリニアブッシュに通します。

左右ともロッドの出っ張りを8mmにします。
8mmだと後の取り付けで調整がわずかで済むハズなのです。

オマケで付いていたGEEETECHのマウスパッドを敷いています。

ステージの上に乗せて、左側に台形ネジロッドを上からネジ込み
ステッピングモーターのカプラーの奥まで差し込みます。
横のスライドブッシュに322mm(短い方)のスムースロッドをゆっくり差し込みます。
カプラーのイモネジは、まだ締めません。

X軸エンドブロックを手前に倒してメインフレームと平行にすると
カプラーの中までうまく入るようです。
 ステッピングモーターの軸にコトンと当たれば挿入OKです。
ステッピングモーターの軸にコトンと当たれば挿入OKです。

台形ネジロッドを少し回して、左側と高さを同じに合わせます。

ステッピングモーター横の穴にコツンと音がするまで入れます。

ん~ん、スムーズとはいい難いですね~特に左右に端に近いと重くなります。
リニアブッシュがガンジガラメで調整できないのがいけないかと。
動画で
かなりスムーズになりますね~
カッターの刃が入る程の隙間ができています。上側には隙間はないのです。
どうしようかな~
そのままでは、重過ぎます。
 隙間にカッターの刃の厚み0.3mmかな?程度の金属を噛ませたいですね~
隙間にカッターの刃の厚み0.3mmかな?程度の金属を噛ませたいですね~
何かないかな~ 眠くなってきた~ 一休みして考えよっ~と!
これで3日目が終わりました。
記録にも時間がかかっていますが、逆戻りが多過ぎですね~^^;
4日目です。
X軸スムースロッドの両側にロッキングナットを4つ付けます。
後でXエンド・ブロックの間隔の調整をするので仮止めです。

急に気になって仕方なくなり、また分解するのでした。
既に前の方で書きましたが、本来の手順の場所に詳細記録を残すことにしたわけです。
この手のマシンは、必ずと言っていい程、逆行があります。
半分は、マーティーが悪いのですが(´-﹏-`;)
さて、エクストローダー・ホルダーが重いのを改善作業にかかります。
このサバ味噌煮の空き缶がありました!
程よい厚みではないかと!
程よい厚みではないかと!

上下を切って円筒をゲットできました。
空き缶は綺麗に洗って廃棄用の袋に保管しておくと役立ちます^^;






2枚入れた方が良さそうなので、2つ折りにしたものを作ります。



ここはこだわりたい所です。
パーツの精度がよければ本来はやらなくていいのですが...
<21.Assemble the X-axis Top Mount>
にいけます。
ここは、パーツリストにM3ワッシャーありますね~
ここは、パーツリストにM3ワッシャーありますね~


やや逆戻りですが、念の為、Z軸の台形ネジロッドを2本とも外します。
ガラス板が割れるといけないのでマウスパッドを敷いています。
スムースロッドにロッキングナット軽く固定して
ガラス板が割れるといけないのでマウスパッドを敷いています。
上からZ Top Mountを左右とも取り付け、
 M3ボルト+ワッシャーとスクエアナットで仮止めします。
M3ボルト+ワッシャーとスクエアナットで仮止めします。
 ロッキングナットでスムースロッドが動かないように締めます。
ロッキングナットでスムースロッドが動かないように締めます。
 この状態でX軸を両サイドから手で持ち上げてみます。
この状態でX軸を両サイドから手で持ち上げてみます。



動画(これは、一人で撮影なので片手ですが)
大丈夫のようです。
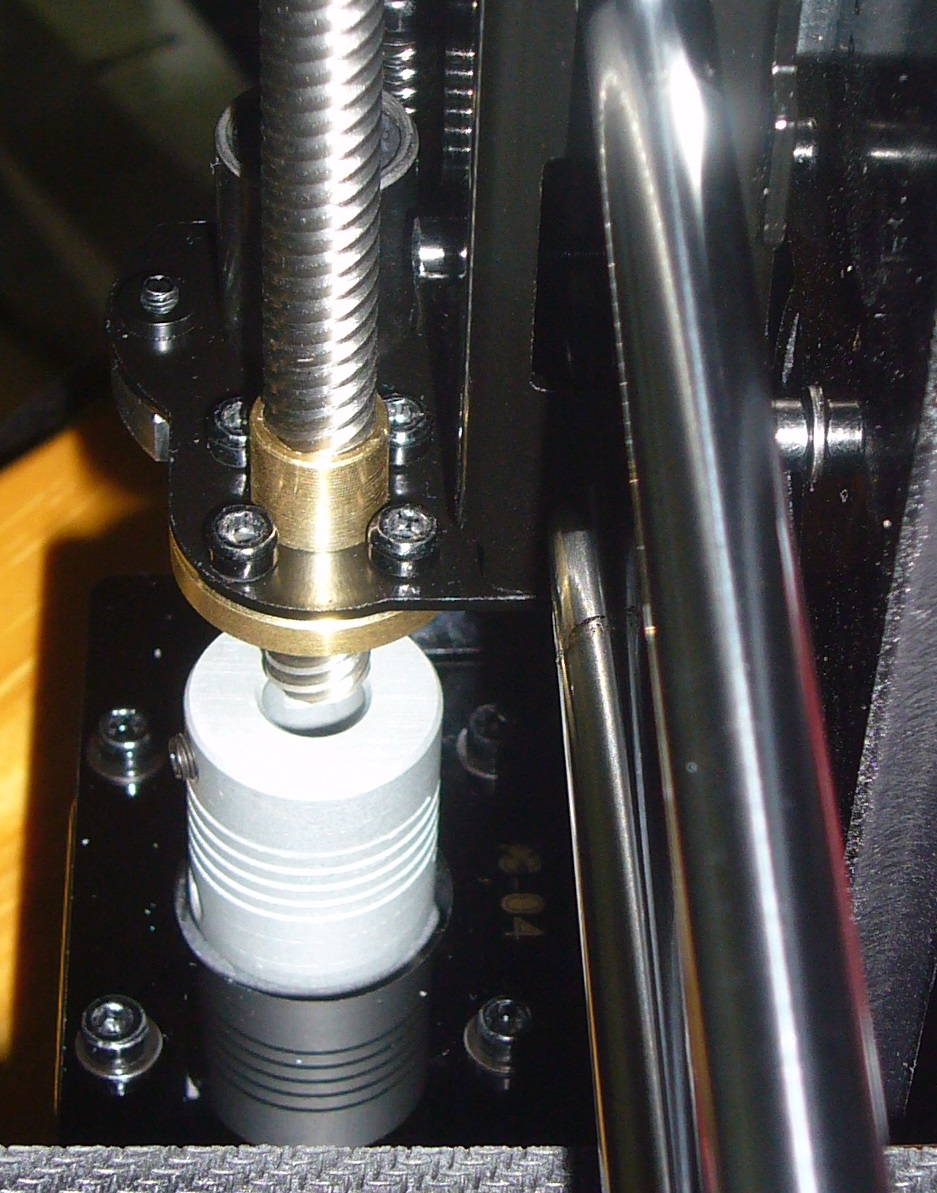
下のステッピングモーターのカプラーの手前で止めて
カプラーの穴位置とのズレを確認します。
カプラーの方が前方に0.5mm程度ズレています。
これだとカプラーの柔軟性で吸収できるでしょう。
左側のズレ。
 右側のズレ。
右側のズレ。
ちょっと分かり難いですね?
 この状態で台形ネジロッドがZ Top Mountから10mmでています。
この状態で台形ネジロッドがZ Top Mountから10mmでています。
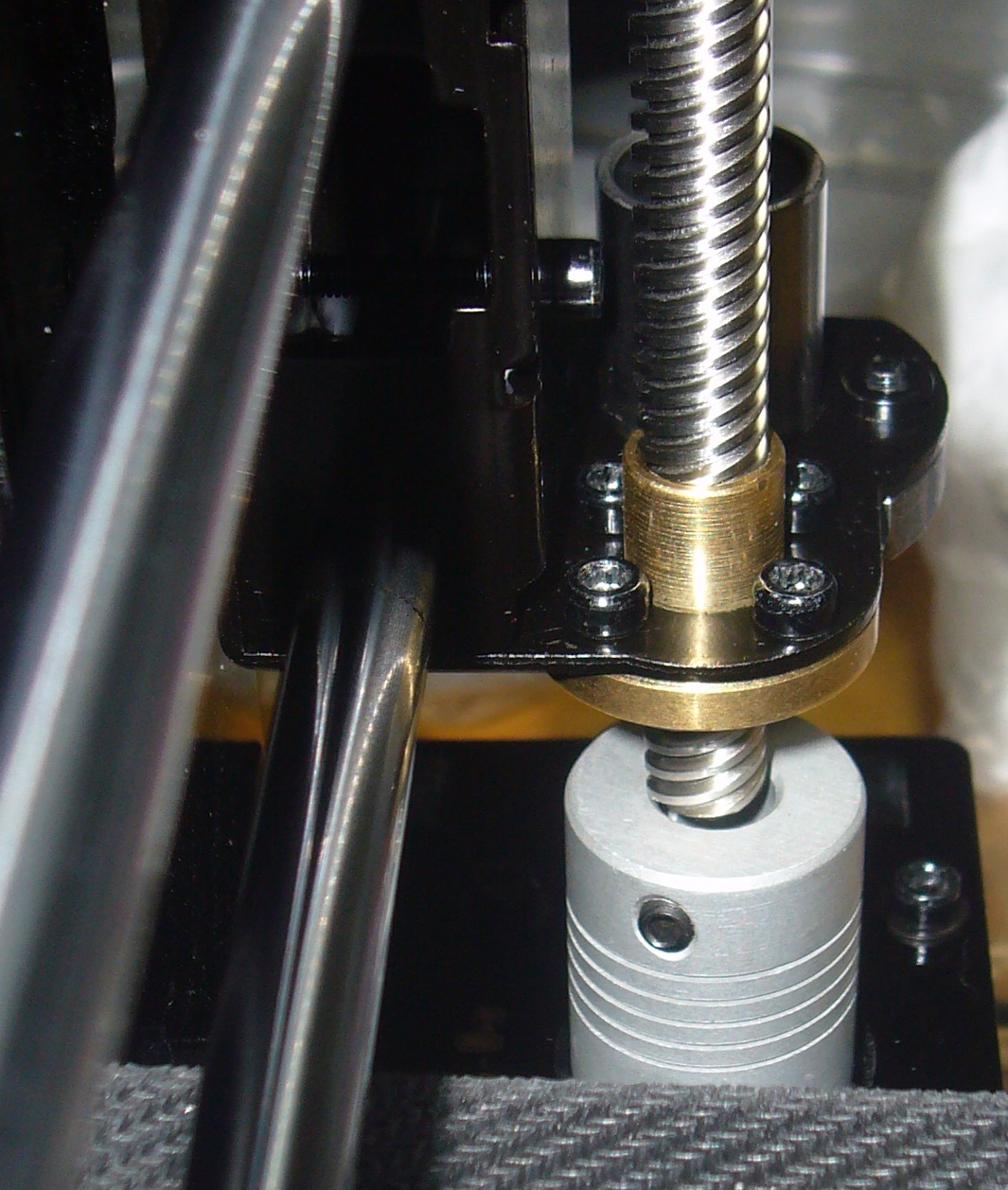

台形ネジロッドを挿入していき、イモネジで固定します。

ステッピングモーターの軸に当たるまで台形ネジロッドを挿すと
カプラーの効力がなくなりそうなので、ここがスレスレまで入れていいでしょう。
組立マニュアルの写真は、両ロッドとも3mm位飛び出していますが、
マーティーのは、ほぼピッタリでした。
右側も同様にします。
 Topのボルトとロッキングナットと本締めしておきます。
Topのボルトとロッキングナットと本締めしておきます。
右側も同様にします。

ここで、ステッピングモーターを手で回して左右の高さ調整します。
モノタロウさんのデジタルノギスでT8ナットの高さを左右同じにします。
 少数第2位までぴったしになりました!偶然でしょうが。
少数第2位までぴったしになりました!偶然でしょうが。
 所が、同じ高さにすると、ステッピングモーターを手で回せない程に重くなるのです。
所が、同じ高さにすると、ステッピングモーターを手で回せない程に重くなるのです。

一時は、手ではほとんど回せない程に重くなったので
一旦、Z軸ロッド、X軸ブロックを分解してやり直しました。
一旦、Z軸ロッド、X軸ブロックを分解してやり直しました。
そして、ステッピングモーターが最も軽く回る位置にすると
左:175.7mmの時、
 右側は、172.8mmに下げないと動きが軽くならないのです。
右側は、172.8mmに下げないと動きが軽くならないのです。
何と3mm近くも斜めにしないと軽くならないのです。
上の方でも左右を同じ高さにすると、
ステッピングモーターを手で回せない程に重くなるのです。
 ステージで調整できますが、X軸とZ軸の直交性は失われます。
ステージで調整できますが、X軸とZ軸の直交性は失われます。

何と3mm近くも斜めにしないと軽くならないのです。
上の方でも左右を同じ高さにすると、
ステッピングモーターを手で回せない程に重くなるのです。

X軸稼働220mmで3mmだと、傾きは、約0.8°になります。
マーティーには、気になって妥協できません。
マーティーには、気になって妥協できません。
X軸エンドブロックの鉄板を曲げるか、また、何かを挟むしか修正方法はなさそうです。
一番可能性が高いのは、鉄板の精度が悪いからだと思われます。
やはり曲げ物は、バラツキが大きく精度を期待できないのだろうか?
やはり曲げ物は、バラツキが大きく精度を期待できないのだろうか?
ひとまず、後で考えることにして先に進みます。
(この対策は、最後にやります)
<22.Mount the Extruder>


裏返して合わせるとセンターの穴だけが合います。




パーツを探す手間も省けます。
保管しておいた、ボルトが長い方のもう1セットです。
M3x30mmの長いボルトになっているか確認します。
(実は、ここでM3x30mmの長いボルトと気づいたのでありますが)



*** ここから 2018.7.30追記 ***
その後、ボルトの先がステッピングモーターに当る事がわかり
 プーリーを逆にしても斜めになり入らないので
プーリーを逆にしても斜めになり入らないので
 この電工ペンチでプーリーの軸になっている4mmボルト
この電工ペンチでプーリーの軸になっている4mmボルト
 4~5mmカットします。
4~5mmカットします。
このペンチ、高価な代物ではないのですが、
両手であれば、そんなに力を掛けなくてもスパッとカットできるのです。
 カットできました。
カットできました。
切断面もキレイです。
 再度、プーリーを組み立てます。
再度、プーリーを組み立てます。
 ステッピングモーターとの接触を回避できました
ステッピングモーターとの接触を回避できました
まあ、右側の可動範囲が10mm広がる程度ですが...
 *** 2018.7.30追記 ここまで ***
*** 2018.7.30追記 ここまで ***
プーリーをX軸右エンドの四角い穴に通して羽つきナットで
その後、ボルトの先がステッピングモーターに当る事がわかり



このペンチ、高価な代物ではないのですが、
両手であれば、そんなに力を掛けなくてもスパッとカットできるのです。

切断面もキレイです。


まあ、右側の可動範囲が10mm広がる程度ですが...

プーリーをX軸右エンドの四角い穴に通して羽つきナットで
ボルトの先がギリギリ出る位に止めます。後で締めるからです。
(これは、ベルトを先に通し忘れた時の写真ですが)
 エクストルーダーモジュールを端に寄せて
エクストルーダーモジュールを端に寄せて
(これは、ベルトを先に通し忘れた時の写真ですが)

ベルトをギザギザの隙間に入れ込みます。
これは、なかなかいいですね~ Y軸もこれにして欲しかった。
これは、なかなかいいですね~ Y軸もこれにして欲しかった。

ステッピングモーターのプーリーギアに掛けます。
 ベルトをピンと張ってベルト固定具に合わせてベルトをカットして
ベルトをピンと張ってベルト固定具に合わせてベルトをカットして

ギザギザの隙間に入れて固定します。



パーツ集め
 ヤスリがついている訳がやっとわかりました。
ヤスリがついている訳がやっとわかりました。
理由がわかったので、何というか逆にスッキリした気分(-_-;)
 ここの穴位置がズレているのです。
ここの穴位置がズレているのです。

理由がわかったので、何というか逆にスッキリした気分(-_-;)


一先ず片方だけで組み立てメインフレームと当ててみます
下側の穴をそのままで上側の穴を広げる方向で大丈夫そうです。
上側の穴を下方向に広げました!こんなもんでしょう。
上側の穴を下方向に広げました!こんなもんでしょう。



可変抵抗器の足に当たらないようにするためです。

先にSDカード側をナット+ワッシャーで止めて
可変抵抗器側は、持ち上げてナット+ワッシャーを付けます

PUSHスイッチにもなっているので少し浮かせて固定します。
PUSHできるか確認します。
 完成~
完成~
 本体に装着します。
本体に装着します。


ここもM3 x 20mmボルト+ワッシャー+ナットです。
おっとボルト不良です。これで3個目。次も不良で4個目です。
M3 x 20mmは、弾切れであります。

ん~ん、いいですね~

次の電源スイッチを取り付けようとした時
あれっ?マニュアルの写真と左右が逆だ?

赤枠の長孔がある方が右だったのです。
 5日目。ここにきてここまで分解して戻るハメになるとは(T_T)
5日目。ここにきてここまで分解して戻るハメになるとは(T_T)
かなり前に遡る必要があります。
今日は、修正と別件であまり作業が進まなかった上にこれです。
明日の5日目にゆっくりやることにします。

老化ですかね~どうも左右裏表が...
このM10ボルトは外したくなかったのですが...

<26.Mount the PSU(Power Supply Unit)>


先に下の方の110V/220V切り替えをした方がいいです。
電源スイッチからケーブルをメインフレーム右側面の四角穴に全部通して
平端子付きの3本を横の四角穴から、もう一方を上の丸穴から出します。
 ACソケットに色を間違えないように奥までグイッと差し込みます。
ACソケットに色を間違えないように奥までグイッと差し込みます。




上を通すとステージ移動中にリニアブッシュに当たる可能性があるからです。


穴がいっぱいあってマニュアルにも載っていません。
PSU側は、このタッピングされた3箇所を使います。

ここは、長いボルトに間違えると
PSUの中でショートする可能性があるので要注意です。
アルミはバーリング加工されていますが、
あまり締めると馬鹿穴になるのでほどほどに締めます。

エクストルーダーを左端に、ステージを最前方にに移動しておいて
PSUが上になるように横に寝かせて、PSUの端部の蓋を開けます。

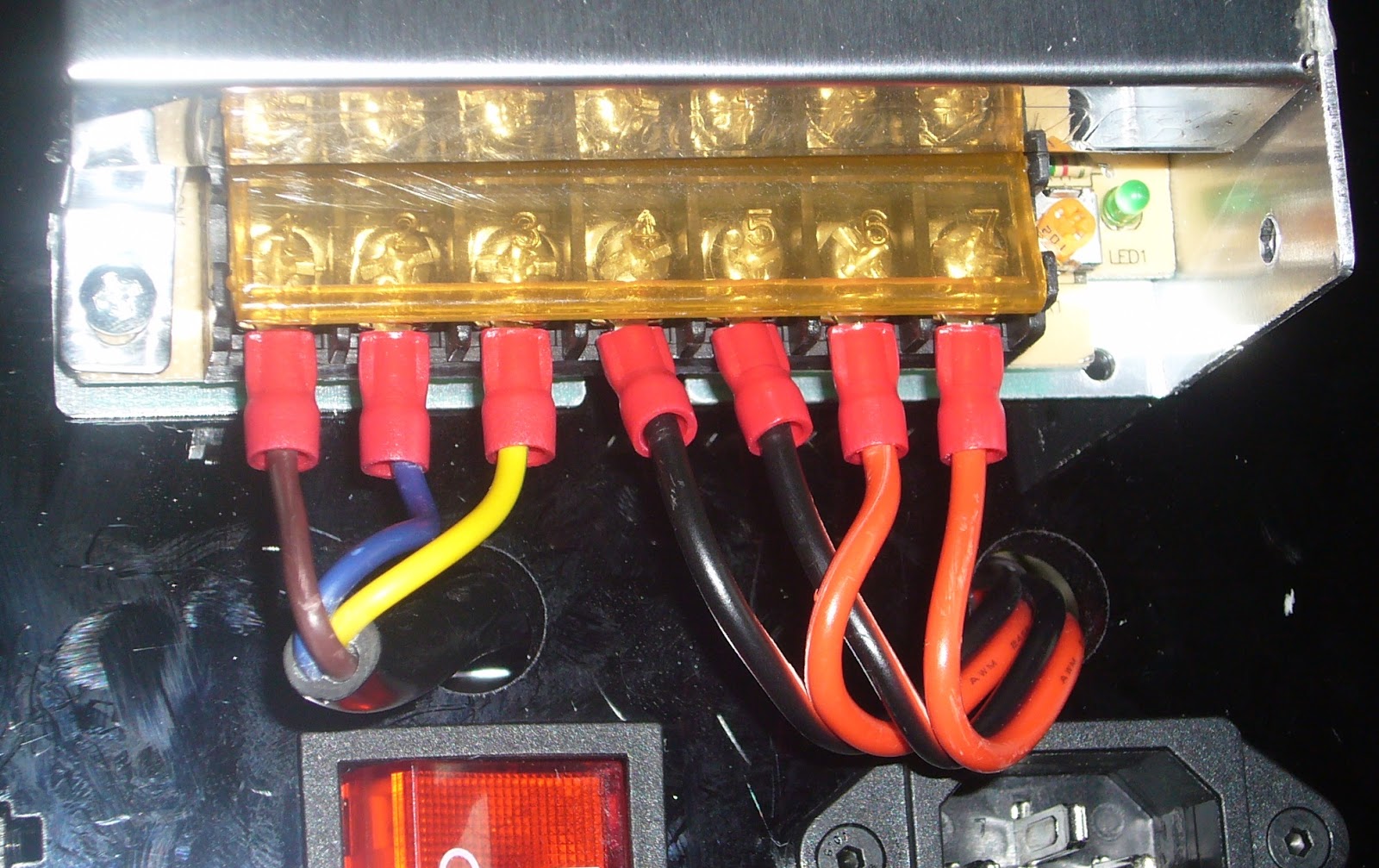
L(AC)N アースマーク COM COM +V +V と刻印があります。

ボルトの下の角ワッシャーの下にU字端子を挿入してボルトを締めていきます。
 左から茶、青、黄/緑、黒、黒、赤、赤 でしっかりボルトを締めます。
左から茶、青、黄/緑、黒、黒、赤、赤 でしっかりボルトを締めます。

ここは、間違えて1回電源を入れると、後戻りしても修復できない結果になるので
マーティーは、休憩を挟んで3回見直しました!休憩を挟むのが大事です(-_-;)
 念の為、組み立て説明書の写真も一応載せておきます。
念の為、組み立て説明書の写真も一応載せておきます。
上と合っています!
上と合っています!

こんな感じで作業しています。
 で、先に進むと、何と、110V/220Vの設定を確認するようにあります。
で、先に進むと、何と、110V/220Vの設定を確認するようにあります。

先に言って欲しい~(´-﹏-`;)
やっぱ組立マニュアルは、印刷代ケチってPDFで見るもんじゃないですね~
ちゃんと印刷して先読みしないと。
まあブログに記録しながらなのでPDFで見てるんですが
で、ハーネスを引っ張り出してPSUを横にして
(最初からこうやれば本体を横にしないで済んだのですね)
PSUの赤丸部のビスと黄色いシールを片側剥いで


いくらDIYと言ってもこれをさせるかな~
一旦電源を入れてからやると感電する箇所が沢山あるので注意が必要です。
下は、スライドした所。
下は、スライドした所。

回路設計者でない一般ユーザーに、これをさせるのは、いかんでしょう!
切り替えスイッチは、外から操作できるようにするべきですね~




蓋の赤枠部が、基板の裏に絶縁シートの下に必ずなるよう要注意です。
 <27.Mount the Control Board>
<27.Mount the Control Board>


アクリルをM3で留める所は、全部使いましたが、まだこんなにあります。
組立マニュアルには、抜けている所が多いです。

まず、白めのスペーサーをボードの四隅の穴にカチッと入れます。


穴が多くてなかなか分かり難いですが、この位置です。


まあこんなもんでしょう。
CNCと同じで、後で大きいのにしないといけないんだろうな~
横の空冷ファンもシロッコファンかな?
CNCと同じで、後で大きいのにしないといけないんだろうな~
横の空冷ファンもシロッコファンかな?

そうだ、大事な事を一つ忘れていました!!
PSUのチェックです。
取り敢えず、無負荷で12Vがでていることだけ確認しておきます。
アナログテスターです。
この方が変な変動とかが直ぐにわかるので。
30Vレンジでピッタリ12Vを示しています。
無負荷ではありますが、変動もなく安定しています。
 次は、配線になりますが、
次は、配線になりますが、
その前にどうしても気になる所を検討します。無負荷ではありますが、変動もなく安定しています。

X軸とZ軸の直交性が悪く、これだけ右側を下げないと
同じ高さにするとZ軸のステッピングモーターが手でも回せない程に重くなるのです。
そのままだと右下下がりの約0.8°傾斜させる必要があり
X軸可動域220mmで3~4mm下がることになります。非常に気持ち悪いです。

そこでこのボルトを少し緩めてみることにします。
緩めて左右の高さを平行にしてから締め直してみますが、全然変わりません。
ここは、ガッチリ嵌合しているようです。

ベルトを外して、右側のロッキングリングを外して、
スムーズロッドの右側を外して、上側にコネます。元が右下方向に傾いているので。
これで左側の金具を矯正するわけです。
 その荒療治を動画で!
その荒療治を動画で!
スムーズロッドの左側を外して、下側にコネます。元が左上方向に傾いているので。
これで右側の金具を矯正できたハズです。

おっ!いいですね~
左右同じ高さでステッピングモーターを手で回すと、かなり軽くなりました!

お~!断然良くなりました。いいです!こんなにも軽くなるなんてという変化です。
重さだけは動画でも伝えられないですね~
それにしてもZ軸のT8ナットとスライドブッシュのガタが左だけ異常に大きいです。
長いスライドブッシュに変えたほうが良さそうです。
動画で!
右側は大丈夫なんですよね~ ちょっと気に入りません。
右側は大丈夫なんですよね~ ちょっと気に入りません。
ブログがかなり長くなりそうなので(もう十二分になってるかあ^^;)
ひとまずここでまとめることにします。
追伸:
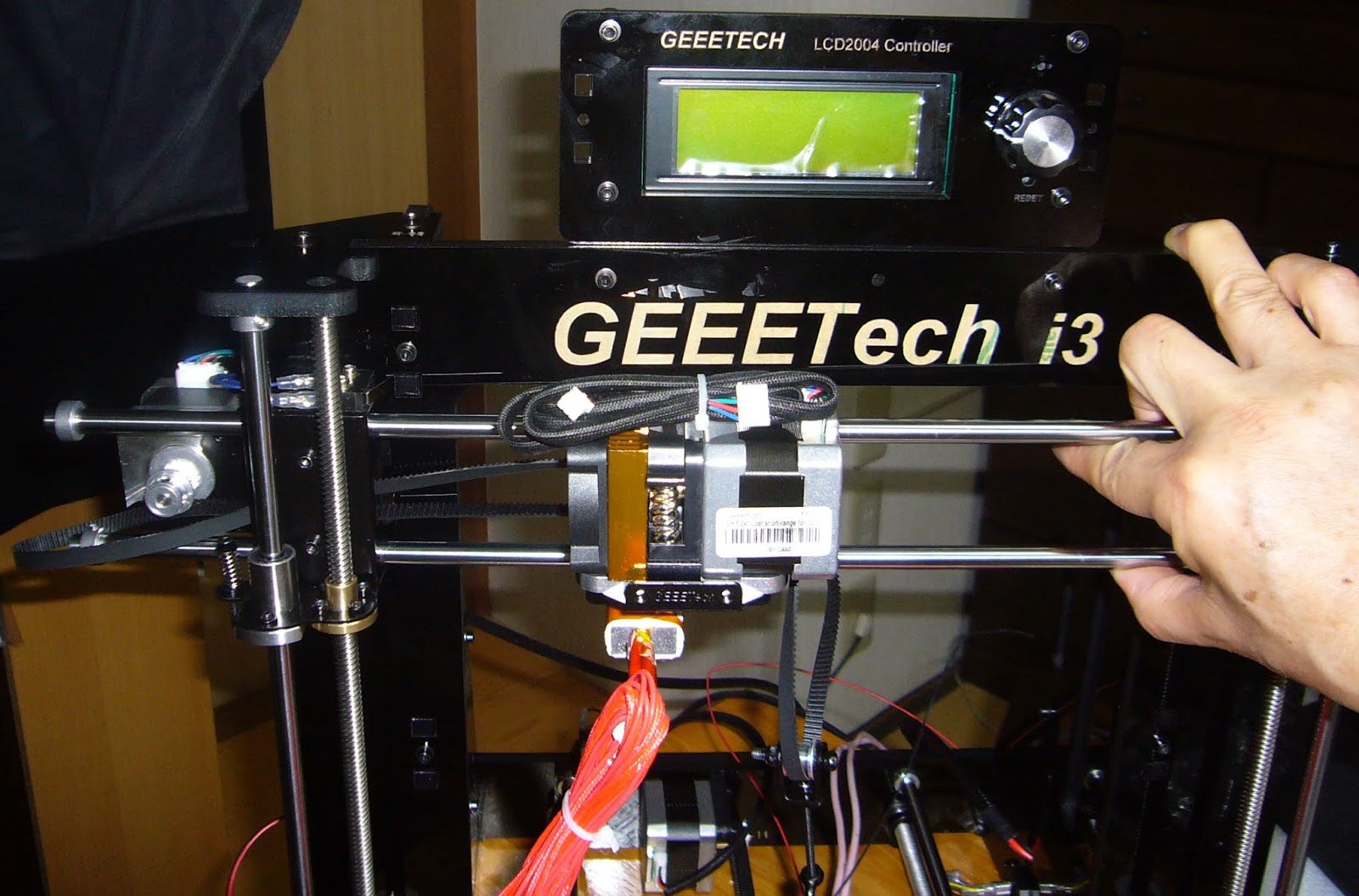
現在の外観です。
裏は、まだ配線が宙ぶらりんです。




追伸(2018.7.29追加)
その後、MT氏から
「X軸のロッキングリングは、ベルトのテンションを受け止めるように
内側に付けた方がいい」とのご指摘がありましたので
マーティーも変更しました!
MTさんありがとうございます。

4 件のコメント:
いよいよ3Dプリンターデビューですね。
おなじタイプのプリンターなので今後の展開が楽しみです。
Fusion360を使いこなしておられるのですぐに造形にかかられることと思います。フィラメントが結構高価ですし、メーカーの評判も色々で困ってしまいます。できましたら、作品を投稿できるサイトがありますので公開ください。(あいかわらず、他力本願です)
昔青年さん、おはようございます。
お~っ!同じタイプですか!
Fusion360は、まだ何とかなると思いますが
その前に3Dプリンタ側の設定項目の意味から勉強です。
設定地獄にハマりそうで、1ヶ月位はかかると見込んでいます。
Facebookアカウントお持ちでしたらGeeetech3Dプリンタの会でお話できます。
当方のは、JGAUROEA A3といいます。同じReprapタイプのものです。
設定は、Cura NIPPO で検索されると、スライサーソフトを日本語化されたものがダウンロードできます。マニュアルが参考になると思います。
Thingiverseというサイトで3Dデータが種々アップされています。Geeetechもありました。CNC2418の3Dデータも結構あります。ユーザーグループもあります。マーティーさんの作品もアップしてもらえれば即利用させてもらいます。笑)
昔青年さん、私の随分先を行かれているんですね~
配線が、まだ終わってなく、これからなんです。
お客様がこられているので、今日は、進めません(-_-;)
まだ、3Dプリンタ動かす所は未知の世界で
スライサーの意味はわかりますが(笑)
貴重な情報ありがとうございました。
コメントを投稿