
組立、調整は、ほぼ終わったので、配線作業に行きますが、
案の定、寄り道してしましました^^;
同型のエクストルーダーで改善をされているのを思い出したのです。
ここでは、フィラメントの入口にガイドを追加されています。
これは(緑枠部)、マーティーのには、付いているので、よしと!
 同じく、「みら太な日々」さんのこちらでは、
同じく、「みら太な日々」さんのこちらでは、
フィラメントとノズルが一直線にならず曲がっているので、
それを改善をされています。
チェックすべく、直ぐに2本のボルトを外します。
 ボルトは長いです。
ボルトは長いです。
ファンとヒートシンクを取り外します。
 本体の方。
本体の方。
 付属していたお試しフィラメントを入れてみます。
付属していたお試しフィラメントを入れてみます。
ノズルの先端からフィラメントの挿入口まで
ほぼ一直線上になっているようです。一安心です(^o^)
 ちなみにノズルからの軸は、ギリギリまで上に出ていて
ちなみにノズルからの軸は、ギリギリまで上に出ていて
上側は、フィラメントが丁度通る程度の穴が開いているので
ノズルの軸は、これ以上は上げなくてもよさそうです。
 エクストルーダーの前方には、
エクストルーダーの前方には、
レイヤーファンか、オートレベリング用のタッチセンサーを付ける予定なので
配線が前に出ているとじゃまになります。
ステッピングモーターが落ちないように、ちょっと下に置いといて
赤丸部のナットを少し緩めて、ヒーターの線を右向きに変えます。
 赤丸部の軸は、M6で、締める方向に90°回すので
赤丸部の軸は、M6で、締める方向に90°回すので
ピッチ1mmの1/4の0.25mm 飛び出すことになります。
それよりも軸の中、シリコンチューブとか入ってなくていいのかな?
 90°向きを変えたら、下のナットをよく締め込んで
90°向きを変えたら、下のナットをよく締め込んで
ステッピングモーターを乗せます。
元々、僅かな隙間がありますが、大丈夫そうです。
ここはアルミにしたい気もしますが、簡単には作れませんね~
 ヒートシンクを元通りにする前に
ヒートシンクを元通りにする前に
No.7 M3ワッシャー(沢山余っているはずです)を2枚だしてきます。
赤丸部にワッシャーをいれます。
 赤丸部にワッシャーを入れておくと
赤丸部にワッシャーを入れておくと
ヒートシンクがファンの樹脂に食い込むのを防げる。との情報がきたのです。
ここは、今後、何度も開け締めすることになるのでしょうね。
 ヒートシンクとファンを元通りに取り付けて完了です!
ヒートシンクとファンを元通りに取り付けて完了です!
 では、組み立ての続きの配線へ進みます。
では、組み立ての続きの配線へ進みます。
 ここで、また思い出しました!
ここで、また思い出しました!
A4988の半固定VRの調整をしなくていいのだろうか?と
んで、また寄り道であります(-_-;)
いかんせん、CNCを持っているが故の心配であります。
CNCの時は知らないので気にせずに組立できたのですが...
念の為、ステッピングモーターシールド A4988の調整をすることにします。
CNCの方では、これが燃えたという報告が多いのです。
以前、CNC2418のコントロールボードWoodpeckerを交換した時は、
 このAliExpressのGeeetechのお店に載っていました。
このAliExpressのGeeetechのお店に載っていました。
Holding Torque:300mN・mは、1.3Aクラスの数値だと思います。
たぶん、220~230mN・mってとこでしょう。

 10Aと15Aのヒューズのようです。
10Aと15Aのヒューズのようです。
こんな高貴な形状、初めてみました。金端子がキラキラ!ホルダも上等!
 裏面。
裏面。
「REV A+」になっています。
 この辺も拡大!
この辺も拡大!
ATMEGA2560とCH340Cです。
左上のPower MOS-FET:STP55NF06(STMicroelectronics)
 ちょっと回路図を探してみると、これが見つかったけど
ちょっと回路図を探してみると、これが見つかったけど
USB~Serial変換がATMEGA16U2-AUなので少々違うようです。
他は、たぶん、これでいいんじゃなかと? 無いよりはマシでしょう!
合致したの探したいけど、組立が止まりそうなので、また今度にします(-_-;)
元画像
では、今度こそ、配線作業に行きま~す!

 配線作業というか、配線の引き回しを思いつくままにやったので
配線作業というか、配線の引き回しを思いつくままにやったので
マニュアルとは、随分、順番が変わっています。
・Z軸の右ステッピングモーター・ケーブル
を電源SWの横の穴に通します。
 裏に回って
裏に回って
・Z軸の右ステッピングモーター・ケーブル
・12V電源ケーブル
・Y軸のステッピングモーター・ケーブル
をメインフレーム左羽の下段の長穴に通します。
・Y軸のリミットSWケーブル
を後側の長穴に通します。
 左横に回って
左横に回って
・Z軸の左ステッピングモーター・ケーブル
をメインフレーム左羽の下段前側の長穴に表側から通します。
 ・Z軸のリミットSWケーブル
・Z軸のリミットSWケーブル
をメインフレーム左羽の上段の長穴に表側から通します。
これは、通し過ぎの悪い例です。実はこのまま先に進んじゃいました(-_-;)
X軸は、下まで下降するので、その分は、余裕を持っておきます。
 その2本
その2本
・Z軸の左ステッピングモーター・ケーブル
・Z軸のリミットSWケーブル
を中段の長穴に裏から通します。
 ・Z軸の左ステッピングモーター・ケーブル
・Z軸の左ステッピングモーター・ケーブル
は、長いので、途中を曲げて
メインフレーム左羽上段の長穴に裏側からちょっと入れて長さを調節します。
 ・X軸のステッピングモーター・ケーブル
・X軸のステッピングモーター・ケーブル
をメインフレーム左羽上段の長穴に表側から通します。
これもX軸が下降するので、その分の余裕をもたせておきます。
 更にメインフレーム左羽中段の長穴に裏側から通します。
更にメインフレーム左羽中段の長穴に裏側から通します。
 ・エクストルーダー・モーター・ケーブル
・エクストルーダー・モーター・ケーブル
もメインフレーム左羽中断の長穴に裏側から通します。
(その後、上段に変えました)
このケーブルは、後で処理を考えますが
LCDの前を通って左から後ろに入るように考えておきます。
その内、キャタピラをつけたい所です。
 LCDの左の方から回すことにします。
LCDの左の方から回すことにします。
処理は、後です。
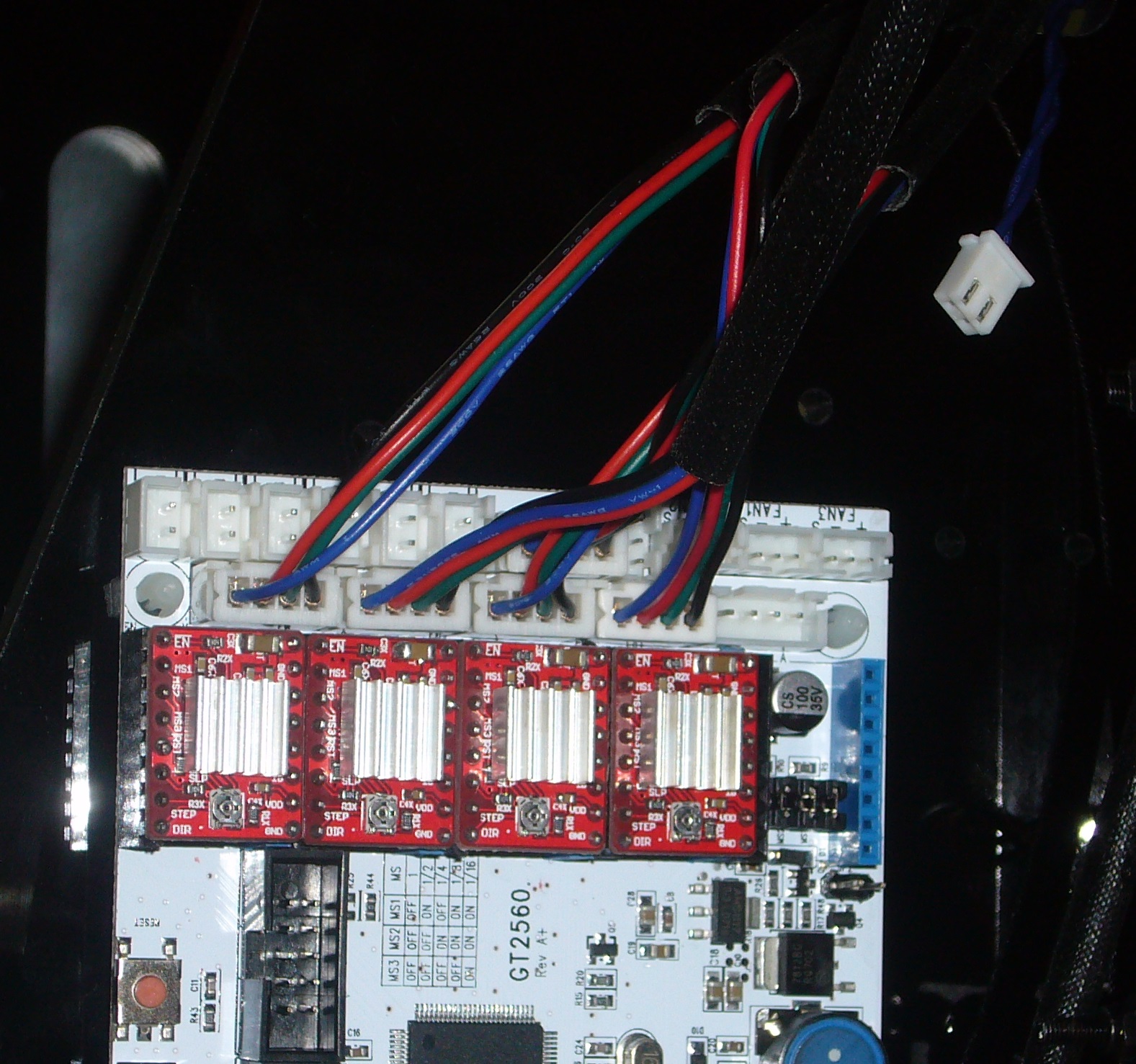
 ・X、Y、Z右、Z左、エクストルーダーのステッピングモーター・ケーブル5本
・X、Y、Z右、Z左、エクストルーダーのステッピングモーター・ケーブル5本
をコントロールボードのコネクタに挿入します。
Z右、Z左は、コネクタの区別はありません。
全部、中段の穴から出した所は、良かったのですが、
前で都度、挿入しないとどこから来ているのか分かり難くて
間違いやすいですね~
左からX、Y、Z、エクストルーダー1、上段は、Z です。
 ・X、Y、Z軸のリミットSWケーブル
・X、Y、Z軸のリミットSWケーブル
をコントロールボードのX-MIN、Y-MIN、Z-MINに挿入します。
マーティーのは、マニュアルと色を変えています。
何となくこの方が好きなだけです^^;
 ・メインフレーム左のファン・ケーブル
・メインフレーム左のファン・ケーブル
をコントロールボードのFAN3に挿入します。
 メインフレーム左羽にタイラップ用の穴があるので
メインフレーム左羽にタイラップ用の穴があるので
上段、中断、下段の三ヶ所に裏側からタイラップを通して
 表側はこんな感じで束ねます。
表側はこんな感じで束ねます。
XYZ軸のリミットSWケーブルは、できるだけ短くしたい気もします。
適当に折り返して束ねておきます。
リミットSWは、Normal Closeなので他線の影響は、気にしなくていいハズです。
 A4988にのめり込んだのと、引き回しに妙に頭を使って結構疲れた性か、
A4988にのめり込んだのと、引き回しに妙に頭を使って結構疲れた性か、
・LCDパネルのフラットケーブルを忘れていました。
上のタイラップは、この後の方がいいです。
 LCDの裏面に挿します。
LCDの裏面に挿します。
LCD基板の裏は、マニュアルと異なっています。
基板にCOB(Chip On Board、ベアチップ)なので、気持ちよくないですね~
特に触れやすい高い所に位置しているので、その内、カバーを付けたい所です。
両側に四角穴とビス穴らしきものがあります。たぶんカバー用でしょう。
2本同じもの、両端も同じです。
突起があるので挿す向きも間違いようがありません。マーティー向きです^^;
 但し、これには、落とし穴があります。
但し、これには、落とし穴があります。
2つのコネクタは、LCD用とSD用なので間違ってはいけません。
あわてて、LCDの方の両端に赤マジックで印をつけました。
 ・フラットケーブル2本は
・フラットケーブル2本は
メインフレーム左羽上段の長穴に裏側から通します。
 表側でタイラップを入れ直して
表側でタイラップを入れ直して
 コネクタは、上がSD Card、下がLCDです。
コネクタは、上がSD Card、下がLCDです。
 コントロールボードのコネクタに挿して
コントロールボードのコネクタに挿して
 引き回しを整えます。
引き回しを整えます。
コイルの上にフラットケーブルが来るのは、ちと嫌ですね~
かと言ってヒートシンクへの風を邪魔してはいけないし...
2018.8.4追記
このフラットケーブルをステッピングモーター・ケーブルと一緒に束ねると
LCDが文字化けする。という情報が入りました。
マーティーのも特定の設定時にでました。
ので、取り敢えず、タイラップを外して
フラットケーブルを裏の方に回して、遠ざけることにしました。
(2018.8.6 下の方に写真追加しました)
 電源コネクタも挿しておきます。
電源コネクタも挿しておきます。
 ケーブルを整えながらメインフレーム左羽のタイラップを軽~く絞ります。
ケーブルを整えながらメインフレーム左羽のタイラップを軽~く絞ります。
表側
 裏側
裏側

 裏側。
裏側。
そもそも、こんな敏感な設計はいかんですね~
裏側のY軸ステッピングモーターの所は
中央の橋渡しフレームに穴があります。
前側から通して、ケーブルに廻して、また、裏から前に通します。
 タイラップを軽めに絞ります。
タイラップを軽めに絞ります。
 Y軸のリミットSWケーブルは、こんな感じ。
Y軸のリミットSWケーブルは、こんな感じ。
 No.54の延長ケーブルを
No.54の延長ケーブルを
 エクストルーダー・ファン・ケーブルに繋ぎます。
エクストルーダー・ファン・ケーブルに繋ぎます。
これは、もっと前でやるべきでした。
 メインフレーム左羽上段の長穴に裏側から通します。
いつの間にか、エクストルーダー・モーター・ケーブルも上段に変えています^^;
メインフレーム左羽上段の長穴に裏側から通します。
いつの間にか、エクストルーダー・モーター・ケーブルも上段に変えています^^;
タイラップを軽~く締めてたので入りましたが、前にやらないといけなかった~
 前側は、エクストルーダー・モーターケーブルに添わせて弛ませます。
前側は、エクストルーダー・モーターケーブルに添わせて弛ませます。
 コントロールボードのFAN1に挿入します。
コントロールボードのFAN1に挿入します。
配線かなり長めなので適当に整えます。
 配線で最も大変そうな、エクストルーダーのヒーターとセンサー線です。
配線で最も大変そうな、エクストルーダーのヒーターとセンサー線です。
No.8 M4ワッシャーの余りと0.8mm位の針金を10~20cm程準備します。
 エクストルーダーの下右の取り付けボルト(M4)を一旦外して
エクストルーダーの下右の取り付けボルト(M4)を一旦外して
針金で輪っかを作り、そのボルトに入れて、ワッシャーを被せます。
 そのボルトでステッピングモーターを留め直します。
そのボルトでステッピングモーターを留め直します。
 針金をヒーター、センサー、モーター、ファン・ケーブルに
針金をヒーター、センサー、モーター、ファン・ケーブルに
巻き付けて形を整えます。
これで、リード線の付根は屈曲しないので耐久性は良くなると思います。
特にノズル部の付根がすぐ切れそうで気になって気になって...
 No.67 スパイラルチューブで整えようかと思いましたが、
No.67 スパイラルチューブで整えようかと思いましたが、
 まずは、動かせる所を目標にしようと...
まずは、動かせる所を目標にしようと...
この辺にビニールテープを巻いて束ねます。
暫定的なので落ち着いてからキレイにすることにします。
 実は、ここで、X軸、エクストルーダーブロックを
実は、ここで、X軸、エクストルーダーブロックを
Z軸ステッピングモーターを手で回して下げていくと
ありゃ~!X軸のステッピングモーターとリミットSW・ケーブルが突っ張ります。
しまった~ またやらかしました(´-﹏-`;)
取り敢えず、X軸のステッピングモーターとリミットSW・ケーブルを
引っ張り出して、X軸、エクストルーダーブロックを一番下まで下げます。
タイラップを緩くしておいて良かった。
 エクストルーダーのセンサーをコントロールボードのコネクタに挿します。
エクストルーダーのセンサーをコントロールボードのコネクタに挿します。
 ターミナルのネジを緩めて、エクストルーダーのヒーター線を
ターミナルのネジを緩めて、エクストルーダーのヒーター線を
この隙間に線だけ(外皮を挟まないように)をいれてネジを締めます。
極性はありません。
ヒゲが横に飛び出してショートしていないか確認します。
アナログテスターのX1レンジで約4Ωでした。
 ヒーターベッドとセンサーも線処理は後回しにするので
ヒーターベッドとセンサーも線処理は後回しにするので
取り敢えず、テープで仮に束ねておきます。
疲れてきて、だんだん、取り敢えずが多くなってきます。
 ヒーターベッド・センサーのコネクタを
ヒーターベッド・センサーのコネクタを
コントロールボードに挿します。
 ヒーターベッドのヒーター線(ピンクのシリコン線)の先を
ヒーターベッドのヒーター線(ピンクのシリコン線)の先を
4~5mm剥きます。
この線は太いので、よじった後、少し平らに潰します。
 線が太いのでターミナルのネジを緩めて隙間を大きく開けます。
線が太いのでターミナルのネジを緩めて隙間を大きく開けます。
シリコン線を挿入しますが、外皮を挿入しないように
特に数本横に飛び出して隣のショートする可能性が高いの十分注意します。
アナログテスターのX1レンジで約1Ωでした。
左は悪い例です。
 また取り敢えず、後ろから針金を使って上方に釣り上げておくことにしました。
また取り敢えず、後ろから針金を使って上方に釣り上げておくことにしました。
上から吊るすのは、意外といいかも^^;
 これで目出たく全配線と引き回し完了です。
これで目出たく全配線と引き回し完了です。
ちょっと最初からこだわり過ぎました(´-﹏-`;)
No.67のスパイラルチューブは、後日、ゆっくり使わせてもらうことにします。
この時点の外観を!
左側面から
 上方前から
上方前から
 正面から
正面から
 右側面から
右側面から
 裏側もいい感じになりました。
裏側もいい感じになりました。
 さて、初動に行く前に
さて、初動に行く前に
キャタピラを注文しておかなくては!
10mm x 20mmは、CNC2418に付けた時の余りがあります。
正式名称は、「Drag Chain Wire Carrier」、薬屋さんのワイヤーか?
どこも送料が高くやっと見つけた安いお店。
アフィリンクがないのでその内、消えると思いますが
7mm x 7mmは、この店
 7mm x 15mmも、同じ店のこれ
7mm x 15mmも、同じ店のこれ
この店、3種類をカゴに入れると突然、送料が跳ね上がるのです。

で、10mm x 10mmは、別の店のこれ
明らかにキャタピラを意識していますね~

最後に、フィラメント・ラック
<29.Tidy Out the Wires>
 さすがにアクリルパーツにはNo.ありません。
さすがにアクリルパーツにはNo.ありません。
No.7のM3ワッシャーは使います。
 久々のアクリルの保護シート剥ぎ、結構快感になってきました。
久々のアクリルの保護シート剥ぎ、結構快感になってきました。
これで最後と思うと、ちょっと寂しいです。
これは簡単、左右3ヵ所をM3ボルト+ワッシャーで留めます。
底板のレーザーカット断面が直角に切れてないので
側板が垂直にはなりませんが、支障はないでしょう。
 上の穴に白パイプを通して、両側にエルボを嵌め込めば完成です。
上の穴に白パイプを通して、両側にエルボを嵌め込めば完成です。

ここでは、フィラメントの入口にガイドを追加されています。
これは(緑枠部)、マーティーのには、付いているので、よしと!

フィラメントとノズルが一直線にならず曲がっているので、
それを改善をされています。
チェックすべく、直ぐに2本のボルトを外します。

ファンとヒートシンクを取り外します。


ノズルの先端からフィラメントの挿入口まで
ほぼ一直線上になっているようです。一安心です(^o^)

上側は、フィラメントが丁度通る程度の穴が開いているので
ノズルの軸は、これ以上は上げなくてもよさそうです。

レイヤーファンか、オートレベリング用のタッチセンサーを付ける予定なので
配線が前に出ているとじゃまになります。
ステッピングモーターが落ちないように、ちょっと下に置いといて
赤丸部のナットを少し緩めて、ヒーターの線を右向きに変えます。

ピッチ1mmの1/4の0.25mm 飛び出すことになります。
それよりも軸の中、シリコンチューブとか入ってなくていいのかな?

ステッピングモーターを乗せます。
元々、僅かな隙間がありますが、大丈夫そうです。
ここはアルミにしたい気もしますが、簡単には作れませんね~

No.7 M3ワッシャー(沢山余っているはずです)を2枚だしてきます。
赤丸部にワッシャーをいれます。

ヒートシンクがファンの樹脂に食い込むのを防げる。との情報がきたのです。
ここは、今後、何度も開け締めすることになるのでしょうね。


マニュアル<28.Wireing>では、最初に、
ステッピングモータードライバにDVR8825を使う場合の設定があります。
マーティーのは、4988ETとあるのでピンヘッダーの変更は不要です。

A4988の半固定VRの調整をしなくていいのだろうか?と
んで、また寄り道であります(-_-;)
いかんせん、CNCを持っているが故の心配であります。
CNCの時は知らないので気にせずに組立できたのですが...
念の為、ステッピングモーターシールド A4988の調整をすることにします。
CNCの方では、これが燃えたという報告が多いのです。
以前、CNC2418のコントロールボードWoodpeckerを交換した時は、
今回もVREF電圧調整でいきます。
A4988モジュールの詳しい使い方は、元祖Pololuにあります。
そこには、電流検出抵抗に50mΩと68mΩの2種類あると載っています。
Pololu製では、50mΩ:R050 か 68mΩ:R068 の表示です。
が、マーティーのを見ると4つのモジュール全部
「R200」つまり200mΩ !?!?!
 A4988チップの本家AllegroのDatasheet(PDF)は、ここの右のリンクから。
A4988チップの本家AllegroのDatasheet(PDF)は、ここの右のリンクから。
そこに、
 ITripMAX:ステッピングモーターのPeak電流
ITripMAX:ステッピングモーターのPeak電流
Rs:電流検出抵抗値
とあるので
VREF = ITripMAX x (8 x Rs)
で求められます。
Rs:200mΩだと[ VREF = Imax x 1.6 ]
Rs:50mΩだと [ VREF = Imax x 0.4 ]
になります。(面倒なのでITripMAX ⇒ Imaxにしました)
更に横道へ!CNC2418の方も確認した事なかったので、確認してみると
あれ~っ! 全部、R100 だ~ (´-﹏-`;)
50mΩで計算していたのに、100mΩなので、
電流が半分になっているということになります。
今でも固いものを切削時にA4988もステッピングモーターも結構熱くなるのに
正しく調整してたら、もっと熱くなってたということか~
だから燃えるやつも出てくるということなのだろうか...?
まあ、結果オーライということで^^;
どうもA4988でも色々あるので、ここは都度確認しないといけないようです。
50mΩより低いのはなさそうなので
まあ、トルクが低くなるけど、発熱は少ない方向にはなりますが...
CNC2418の方は、100mΩで0.65Vにしていたので
実際には、
Imax=0.65÷8÷0.1=0.75A0.81Aになります。定格1.33Aの56%61%です。
***2019.3.9訂正、オオボケだ~(-_-;)***
サンケンのA4988アプリケーションノート(PDF)の応用回路例では、
Rs:0.47Ωになっています。
それと、AllegroのA4988 Datasheetで、
Rs Pin(電流検出端子)入力定格:0.5Vmax とあり
Rs:200mΩで、Imax:1.5Aでも、0.3Vとなり大丈夫です。
VREF 定格:0~4.0V となっています。(備忘録!)
さて、プリンタの方、組立時に調べていたステッピングモーターの品番は
<X・Y・Z軸:42SHD0034-20B>A4988モジュールの詳しい使い方は、元祖Pololuにあります。
そこには、電流検出抵抗に50mΩと68mΩの2種類あると載っています。
Pololu製では、50mΩ:R050 か 68mΩ:R068 の表示です。
が、マーティーのを見ると4つのモジュール全部
「R200」つまり200mΩ !?!?!

そこに、
Rs:電流検出抵抗値
とあるので
VREF = ITripMAX x (8 x Rs)
で求められます。
Rs:200mΩだと[ VREF = Imax x 1.6 ]
Rs:50mΩだと [ VREF = Imax x 0.4 ]
になります。(面倒なのでITripMAX ⇒ Imaxにしました)
更に横道へ!CNC2418の方も確認した事なかったので、確認してみると
あれ~っ! 全部、R100 だ~ (´-﹏-`;)
50mΩで計算していたのに、100mΩなので、
電流が半分になっているということになります。
今でも固いものを切削時にA4988もステッピングモーターも結構熱くなるのに
正しく調整してたら、もっと熱くなってたということか~
だから燃えるやつも出てくるということなのだろうか...?
まあ、結果オーライということで^^;
どうもA4988でも色々あるので、ここは都度確認しないといけないようです。
50mΩより低いのはなさそうなので
まあ、トルクが低くなるけど、発熱は少ない方向にはなりますが...
実際には、
Imax=0.65÷8÷0.1=
***2019.3.9訂正、オオボケだ~(-_-;)***
サンケンのA4988アプリケーションノート(PDF)の応用回路例では、
Rs:0.47Ωになっています。
これも、今まで0.047Ωと思い込んでいました。
それと、AllegroのA4988 Datasheetで、
Rs Pin(電流検出端子)入力定格:0.5Vmax とあり
Rs:200mΩで、Imax:1.5Aでも、0.3Vとなり大丈夫です。
VREF 定格:0~4.0V となっています。(備忘録!)
さて、プリンタの方、組立時に調べていたステッピングモーターの品番は

Holding Torque:300mN・mは、1.3Aクラスの数値だと思います。
たぶん、220~230mN・mってとこでしょう。

Rs:200mΩだと
VREF = Imax x 8 x 0.2 = 1.0 x 1.6 = 1.6V
50%にディレーティングして0.8Vにしようかな!
<エクストルーダー:42HS3418-24B15>
 eBayのここにありました。
eBayのここにありました。
1.5Aなのに、500mN・mは、1.7~1.8Aクラスだ!性能良くなったのかな~?
 こちらは、X・Y・Z軸のやつの1.5倍ですね~
こちらは、X・Y・Z軸のやつの1.5倍ですね~
Rs:200mΩだと
VREF = Imax x 8 x 0.2 = 1.5 x 1.6 = 2.4V
定格 VREFMAX:4.0Vなので大丈夫ですが
これも50%にディレーティングして、1.2Vかな?
というか、ここ、そんなにトルクいるのかな?
後は、使ってみて様子見することにします。
ひとまず、オリジナルの状態を確認してから考えよっと。
という長い机上検討を経て(-_-;)
コントロールボードの出荷状態の設定値を測定することにします。
本体からコントロールボード(GT2560)を外してきます。
たぶん、USB給電だけで確認できると思います。
...やはり、USBだけでA4988に5V給電されました。
CNC2418と同じCH340なのでドライバインストールなく認識されました。
まずは、アナログテスターで!
A4988モジュールの半固定VRの中心とGNDを測ります。
今流行りのほぼ!0.8V
これは!マーティーが設定しようとしてた
50%ディレーティングの0.8Vとほぼ同じだ! 偶然なのでビックリ。
 デジタルでX・Y・Z・エクストルーダーの4つを測ってみることにします。
デジタルでX・Y・Z・エクストルーダーの4つを測ってみることにします。
まず、VCC:4.93V
 X軸用:0.873V
X軸用:0.873V
Imax = VREF ÷ 1.6 = 0.55A
半固定VRの中央と、A4988右下GND間で測定しています。
 Y軸用:0.830V
Y軸用:0.830V
Imax = VREF ÷ 1.6 = 0.52A
 Z軸用:0.834V
Z軸用:0.834V
Imax = VREF ÷ 1.6 = 0.52A
Z軸は、1つのA4988でステッピングモーター2個を並列ドライブしているけど
大丈夫なんだろうか?
コイルの特性がほぼ同じで、ほぼ同等に並列に流れるとしても
夫々のステッピングモーターでは、1/2の電流になるわけで
トルク足りるのだろうか?
1モーター当り 0.26A、定格の26%になります。
X軸モジュールとエクストルーダー、わりと重い気もします。
動かす前からあまり心配しても仕方ないですね~
(実は、後日この心配が的中して次の投稿で右往左往することになります)
 エクストルーダー用:0.801V
エクストルーダー用:0.801V
Imax = VREF ÷ 1.6 = 0.50A
これもXYZと同じですね~
マーティーは、ここは、1.2Vにしょうとしていましたが
同じ0.8Vで良さそうです。
 まあ、机上検討の考えとほぼ一致してたので、再調整は行うことなく
まあ、机上検討の考えとほぼ一致してたので、再調整は行うことなく
とても安心して次へ進むマーティーであります。
よくよく見ると、半固定VRの位置は、どれもほぼ中央です。
中央で0.8VになるようにGeeetech専用にしているのかもしれません。
ステッピングモーターにも「GEEETECH」が刻印されている位なので、
特に壊れて、他店品に交換する場合は、再調整が必須でしょう。
 せっかくなので、ついでに基板の写真も少し。
せっかくなので、ついでに基板の写真も少し。
コネクタ接続したら、なかなか撮れないので。後々役に立つかも?50%にディレーティングして0.8Vにしようかな!
<エクストルーダー:42HS3418-24B15>

1.5Aなのに、500mN・mは、1.7~1.8Aクラスだ!性能良くなったのかな~?

Rs:200mΩだと
VREF = Imax x 8 x 0.2 = 1.5 x 1.6 = 2.4V
定格 VREFMAX:4.0Vなので大丈夫ですが
これも50%にディレーティングして、1.2Vかな?
というか、ここ、そんなにトルクいるのかな?
後は、使ってみて様子見することにします。
ひとまず、オリジナルの状態を確認してから考えよっと。
思うに、
50mΩとして計算して設定すると、実際には、1/4の電流で動くことになります。
CNC程のトルクは必要ないということで、Geeetechの発熱対策なのかも?
そこまでしているのならコントロール基板にA4988が既に挿してあったので
VREFも調整済みなのかもしれません?
50mΩとして計算して設定すると、実際には、1/4の電流で動くことになります。
CNC程のトルクは必要ないということで、Geeetechの発熱対策なのかも?
そこまでしているのならコントロール基板にA4988が既に挿してあったので
VREFも調整済みなのかもしれません?
という長い机上検討を経て(-_-;)
コントロールボードの出荷状態の設定値を測定することにします。
本体からコントロールボード(GT2560)を外してきます。
たぶん、USB給電だけで確認できると思います。
...やはり、USBだけでA4988に5V給電されました。
CNC2418と同じCH340なのでドライバインストールなく認識されました。
まずは、アナログテスターで!
A4988モジュールの半固定VRの中心とGNDを測ります。
今流行りのほぼ!0.8V
これは!マーティーが設定しようとしてた
50%ディレーティングの0.8Vとほぼ同じだ! 偶然なのでビックリ。

まず、VCC:4.93V

Imax = VREF ÷ 1.6 = 0.55A
半固定VRの中央と、A4988右下GND間で測定しています。

Imax = VREF ÷ 1.6 = 0.52A

Imax = VREF ÷ 1.6 = 0.52A
Z軸は、1つのA4988でステッピングモーター2個を並列ドライブしているけど
大丈夫なんだろうか?
コイルの特性がほぼ同じで、ほぼ同等に並列に流れるとしても
夫々のステッピングモーターでは、1/2の電流になるわけで
トルク足りるのだろうか?
1モーター当り 0.26A、定格の26%になります。
X軸モジュールとエクストルーダー、わりと重い気もします。
動かす前からあまり心配しても仕方ないですね~
(実は、後日この心配が的中して次の投稿で右往左往することになります)

Imax = VREF ÷ 1.6 = 0.50A
これもXYZと同じですね~
マーティーは、ここは、1.2Vにしょうとしていましたが
同じ0.8Vで良さそうです。

とても安心して次へ進むマーティーであります。
よくよく見ると、半固定VRの位置は、どれもほぼ中央です。
中央で0.8VになるようにGeeetech専用にしているのかもしれません。
ステッピングモーターにも「GEEETECH」が刻印されている位なので、
特に壊れて、他店品に交換する場合は、再調整が必須でしょう。


こんな高貴な形状、初めてみました。金端子がキラキラ!ホルダも上等!

「REV A+」になっています。

ATMEGA2560とCH340Cです。
左上のPower MOS-FET:STP55NF06(STMicroelectronics)
RDS(ON):15mΩ(@VGS=10V、ID=27.5A)! とても良いものです。
ヒートベッドとエクストルーダー・ヒーター用かな?
CNC2418のスピンドルPWM用のIRF540のRDS(ON)より1/4~1/5低いです。
ただ、ヒートシンクが12Vでスイッチングしているドレイン直結なので要注意です。

USB~Serial変換がATMEGA16U2-AUなので少々違うようです。
他は、たぶん、これでいいんじゃなかと? 無いよりはマシでしょう!
合致したの探したいけど、組立が止まりそうなので、また今度にします(-_-;)
元画像
{kind=link}
 |
| 出所:reprap.org |
では、今度こそ、配線作業に行きま~す!
<28.Wireing>
{kind=link}
一応、オリジナルを載せました。
お~っ!エクストローダーが2個つけれるようになっています!

まず、A4で印刷します。
 Step1.
Step1.
ステッピングモーター・ドライバ A4988の下の
ピンヘッダーを全部つけるように書いてあります。
マーティーのは、最初からピンヘッダー、全部挿してあったのでやることなし。
Step2.
A4988モジュールをソケットに装着するように書いてありますが
前の<27.Mount the Control Board>でヒートシンクまで付けたのです。
ここもやることなし。
と、マニュアルを進んでいくと
「For your convenience, the above two steps is finished by us,
you can skip them.」
はあぁ~ちょっと気が抜けました(*_*)
各コネクタを接続する前にXYZリミットスイッチのケーブルを

ステッピングモーター・ドライバ A4988の下の
ピンヘッダーを全部つけるように書いてあります。
マーティーのは、最初からピンヘッダー、全部挿してあったのでやることなし。
Step2.
A4988モジュールをソケットに装着するように書いてありますが
前の<27.Mount the Control Board>でヒートシンクまで付けたのです。
ここもやることなし。
と、マニュアルを進んでいくと
「For your convenience, the above two steps is finished by us,
you can skip them.」
はあぁ~ちょっと気が抜けました(*_*)
各コネクタを接続する前にXYZリミットスイッチのケーブルを
スイッチから外して捻っておきます。多少なりともノイズに強くなります。
こんな感じ。
後からわかるのですが
リミットSWは、Normal Closeで使っているので耐ノイズ性は、ほぼ無関係です。
こんな感じ。
後からわかるのですが
リミットSWは、Normal Closeで使っているので耐ノイズ性は、ほぼ無関係です。

マニュアルとは、随分、順番が変わっています。
・Z軸の右ステッピングモーター・ケーブル
を電源SWの横の穴に通します。

・Z軸の右ステッピングモーター・ケーブル
・12V電源ケーブル
・Y軸のステッピングモーター・ケーブル
をメインフレーム左羽の下段の長穴に通します。
・Y軸のリミットSWケーブル
を後側の長穴に通します。

・Z軸の左ステッピングモーター・ケーブル
をメインフレーム左羽の下段前側の長穴に表側から通します。

をメインフレーム左羽の上段の長穴に表側から通します。
これは、通し過ぎの悪い例です。実はこのまま先に進んじゃいました(-_-;)
X軸は、下まで下降するので、その分は、余裕を持っておきます。

・Z軸の左ステッピングモーター・ケーブル
・Z軸のリミットSWケーブル
を中段の長穴に裏から通します。

は、長いので、途中を曲げて
メインフレーム左羽上段の長穴に裏側からちょっと入れて長さを調節します。

をメインフレーム左羽上段の長穴に表側から通します。
これもX軸が下降するので、その分の余裕をもたせておきます。


もメインフレーム左羽中断の長穴に裏側から通します。
(その後、上段に変えました)
このケーブルは、後で処理を考えますが
LCDの前を通って左から後ろに入るように考えておきます。
その内、キャタピラをつけたい所です。

処理は、後です。

をコントロールボードのコネクタに挿入します。
Z右、Z左は、コネクタの区別はありません。
全部、中段の穴から出した所は、良かったのですが、
前で都度、挿入しないとどこから来ているのか分かり難くて
間違いやすいですね~
左からX、Y、Z、エクストルーダー1、上段は、Z です。
をコントロールボードのX-MIN、Y-MIN、Z-MINに挿入します。
マーティーのは、マニュアルと色を変えています。
何となくこの方が好きなだけです^^;

をコントロールボードのFAN3に挿入します。

上段、中断、下段の三ヶ所に裏側からタイラップを通して

XYZ軸のリミットSWケーブルは、できるだけ短くしたい気もします。
適当に折り返して束ねておきます。
リミットSWは、Normal Closeなので他線の影響は、気にしなくていいハズです。

・LCDパネルのフラットケーブルを忘れていました。
上のタイラップは、この後の方がいいです。

LCD基板の裏は、マニュアルと異なっています。
基板にCOB(Chip On Board、ベアチップ)なので、気持ちよくないですね~
特に触れやすい高い所に位置しているので、その内、カバーを付けたい所です。
両側に四角穴とビス穴らしきものがあります。たぶんカバー用でしょう。
2本同じもの、両端も同じです。
突起があるので挿す向きも間違いようがありません。マーティー向きです^^;

2つのコネクタは、LCD用とSD用なので間違ってはいけません。
あわてて、LCDの方の両端に赤マジックで印をつけました。

メインフレーム左羽上段の長穴に裏側から通します。




コイルの上にフラットケーブルが来るのは、ちと嫌ですね~
かと言ってヒートシンクへの風を邪魔してはいけないし...
2018.8.4追記
このフラットケーブルをステッピングモーター・ケーブルと一緒に束ねると
LCDが文字化けする。という情報が入りました。
マーティーのも特定の設定時にでました。
ので、取り敢えず、タイラップを外して
フラットケーブルを裏の方に回して、遠ざけることにしました。
(2018.8.6 下の方に写真追加しました)


表側


*** ここから 2018.8.6追記 ***
8月4日、LCDのフラットケーブルをステッピングモーターと一緒に束ねると
8月4日、LCDのフラットケーブルをステッピングモーターと一緒に束ねると
LCD文字化けがでる。という情報が入ってきました。
実際、マーティーのもある特定の項目で発生が確認できました。
実際、マーティーのもある特定の項目で発生が確認できました。
取り敢えず、暫定対策として、一旦、タイラップを外して
フラットケーブルを裏側に回して、ビニールテープで留めます。
これで、発生した所での文字化けフリーズは、でなくなったようです。
マーティーは、先人方のを見ないでマニュアルだけでやろうとしているので
逆戻りがとても多いです(T_T)
側面。
側面。

ここは、少しでも接触していると影響を受けるようで
まだ、上段の穴を通したままで、ステッピングモーター・ケーブルと
そこで接近していて嫌ですね~
まだ、上段の穴を通したままで、ステッピングモーター・ケーブルと
そこで接近していて嫌ですね~
アルミ箔テープで包んだ方が良さそうなので、後で百均に行くことにします。
かなり敏感なのでLCDパネルの裏もシールドしたい所です。そもそも、こんな敏感な設計はいかんですね~
後で考えることにするので、タイラップは締めないでおきます。
配線処理が、みるも無残になってきたし、後でじっくりやることにします。
 *** 2018.8.6追記 ここまで ***
*** 2018.8.6追記 ここまで ***
配線処理が、みるも無残になってきたし、後でじっくりやることにします。

裏側のY軸ステッピングモーターの所は
中央の橋渡しフレームに穴があります。
前側から通して、ケーブルに廻して、また、裏から前に通します。




これは、もっと前でやるべきでした。

タイラップを軽~く締めてたので入りましたが、前にやらないといけなかった~


配線かなり長めなので適当に整えます。

No.8 M4ワッシャーの余りと0.8mm位の針金を10~20cm程準備します。

針金で輪っかを作り、そのボルトに入れて、ワッシャーを被せます。


巻き付けて形を整えます。
これで、リード線の付根は屈曲しないので耐久性は良くなると思います。
特にノズル部の付根がすぐ切れそうで気になって気になって...


この辺にビニールテープを巻いて束ねます。
暫定的なので落ち着いてからキレイにすることにします。

Z軸ステッピングモーターを手で回して下げていくと
ありゃ~!X軸のステッピングモーターとリミットSW・ケーブルが突っ張ります。
しまった~ またやらかしました(´-﹏-`;)
取り敢えず、X軸のステッピングモーターとリミットSW・ケーブルを
引っ張り出して、X軸、エクストルーダーブロックを一番下まで下げます。
タイラップを緩くしておいて良かった。


この隙間に線だけ(外皮を挟まないように)をいれてネジを締めます。
極性はありません。
ヒゲが横に飛び出してショートしていないか確認します。
アナログテスターのX1レンジで約4Ωでした。

取り敢えず、テープで仮に束ねておきます。
疲れてきて、だんだん、取り敢えずが多くなってきます。

コントロールボードに挿します。

4~5mm剥きます。
この線は太いので、よじった後、少し平らに潰します。

シリコン線を挿入しますが、外皮を挿入しないように
特に数本横に飛び出して隣のショートする可能性が高いの十分注意します。
アナログテスターのX1レンジで約1Ωでした。
左は悪い例です。

上から吊るすのは、意外といいかも^^;

ちょっと最初からこだわり過ぎました(´-﹏-`;)
No.67のスパイラルチューブは、後日、ゆっくり使わせてもらうことにします。
この時点の外観を!
左側面から





キャタピラを注文しておかなくては!
10mm x 20mmは、CNC2418に付けた時の余りがあります。
正式名称は、「Drag Chain Wire Carrier」、薬屋さんのワイヤーか?
どこも送料が高くやっと見つけた安いお店。
アフィリンクがないのでその内、消えると思いますが
7mm x 7mmは、この店

で、10mm x 10mmは、別の店のこれ
明らかにキャタピラを意識していますね~

最後に、フィラメント・ラック
<29.Tidy Out the Wires>

No.7のM3ワッシャーは使います。

これで最後と思うと、ちょっと寂しいです。
これは簡単、左右3ヵ所をM3ボルト+ワッシャーで留めます。
底板のレーザーカット断面が直角に切れてないので
側板が垂直にはなりませんが、支障はないでしょう。


次は、いよいよ火入れ式!
トラップは、まだまだありそうです。
というか、既に引っかかって交戦中です(´-﹏-`;)
<<TO BE CONTINUED>>
トラップは、まだまだありそうです。
というか、既に引っかかって交戦中です(´-﹏-`;)
<<TO BE CONTINUED>>
4 件のコメント:
このエクストルーダなかなかよさげですね。
フィラメント挿入が楽そうです。
私も次号機はこれにしようかな。
ボーデンタイプにするかどうするか迷い中
みら太さん、お久しぶりです!
組立に夢中でまた応答遅くなってm(_ _)m
みら太さんのを沢山参考にさせていただき助かりました!
レイヤーファンが標準で付いていないので発注して到着待ちです。
ボーデンタイプ?勉強しときます。
こんばんわ!あるいはおはようかも、私のGT2560が何かをしたらうんともすんとも慌ててGEEETECHに連絡9日経ちますが皆さん再送からいつ頃到着しましたか。もし公開でよろしければ教えてください。
沢山アセンブリを作れました。今後公開予定
Kazuo amayakさん、おはようございます。でした^^;
見ていただきありがとうございます。
リニアブッシュや3D Touch Sensorは、1週間位だったと思います。
コメントを投稿